About me
I am a graduate student in Mechatronics Engineering in the department of Mechanical engineering at the K.N. Toosi University of Technology, Tehran, Iran, in 2017. My advisor is Prof. Taghirad, and I am a member of Advanced Robotics and Automated Systems (ARAS). I received my BS degree in Robotics Engineering from Shahrood University of Technology, Shahrood, Iran, where I worked under the supervision of Dr. Toosian Shandiz, in 2014.
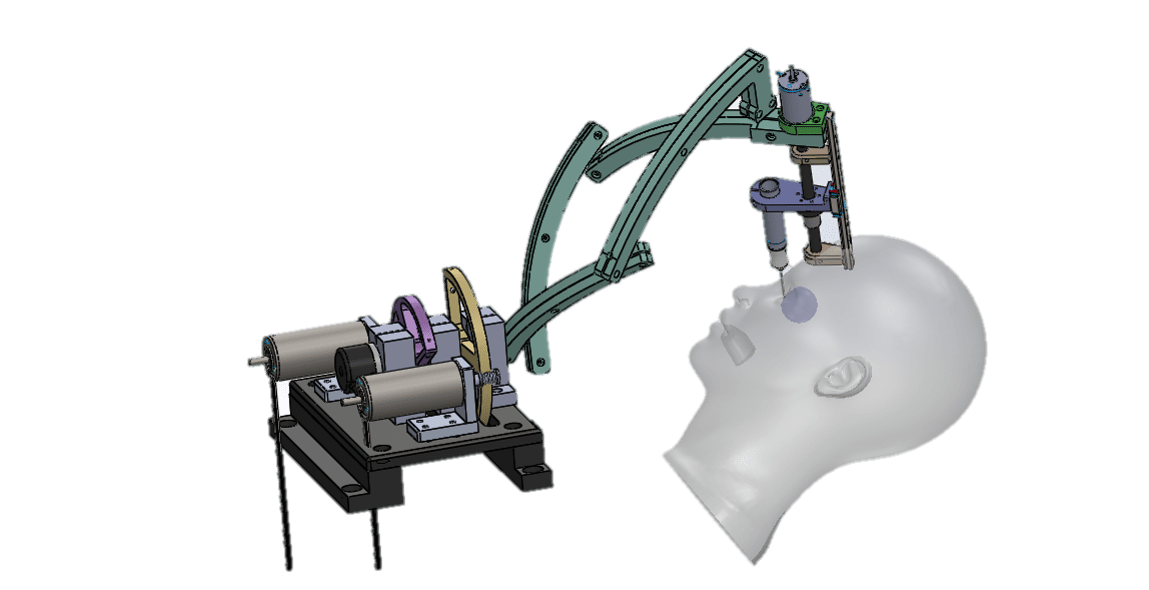
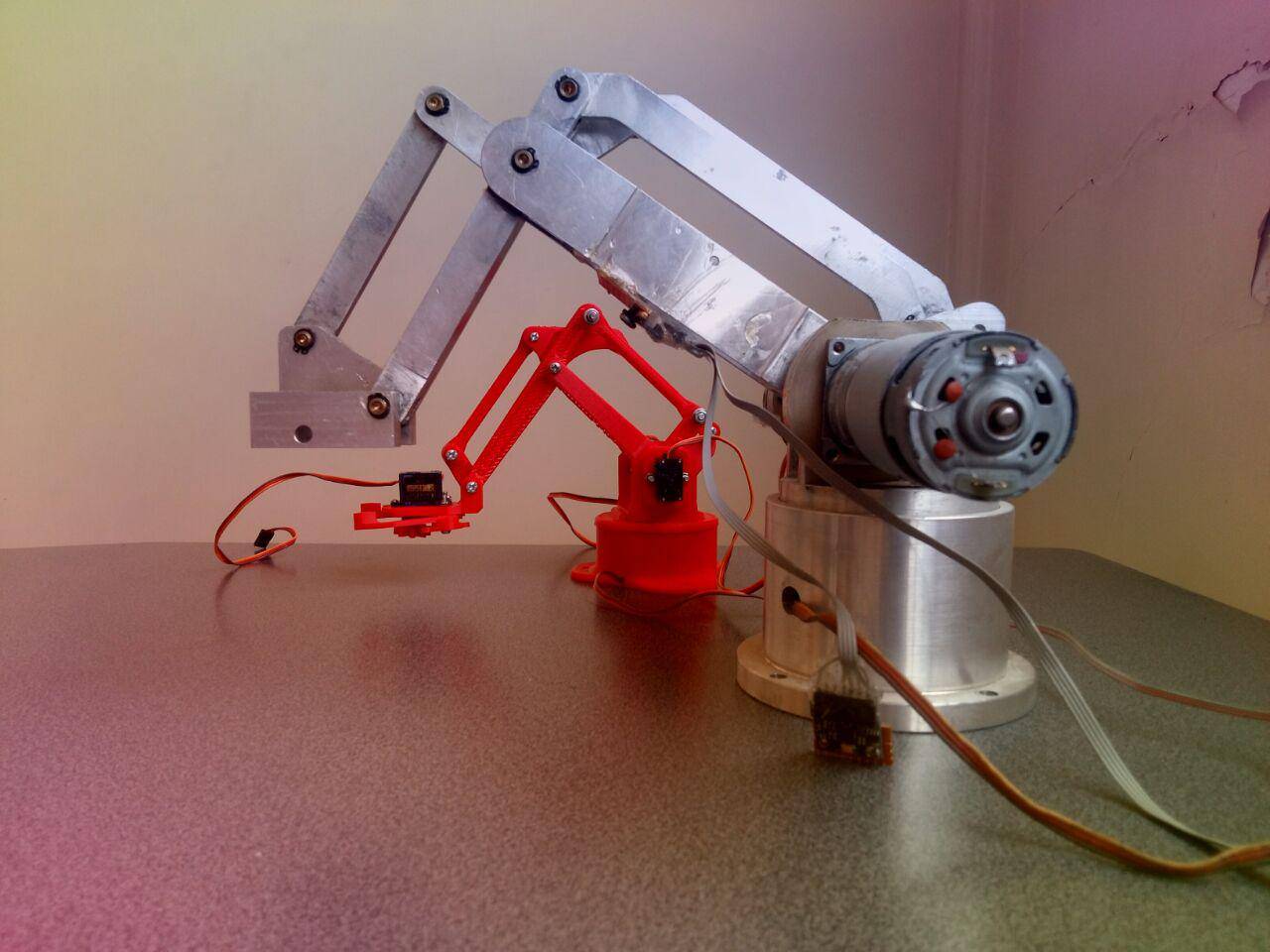
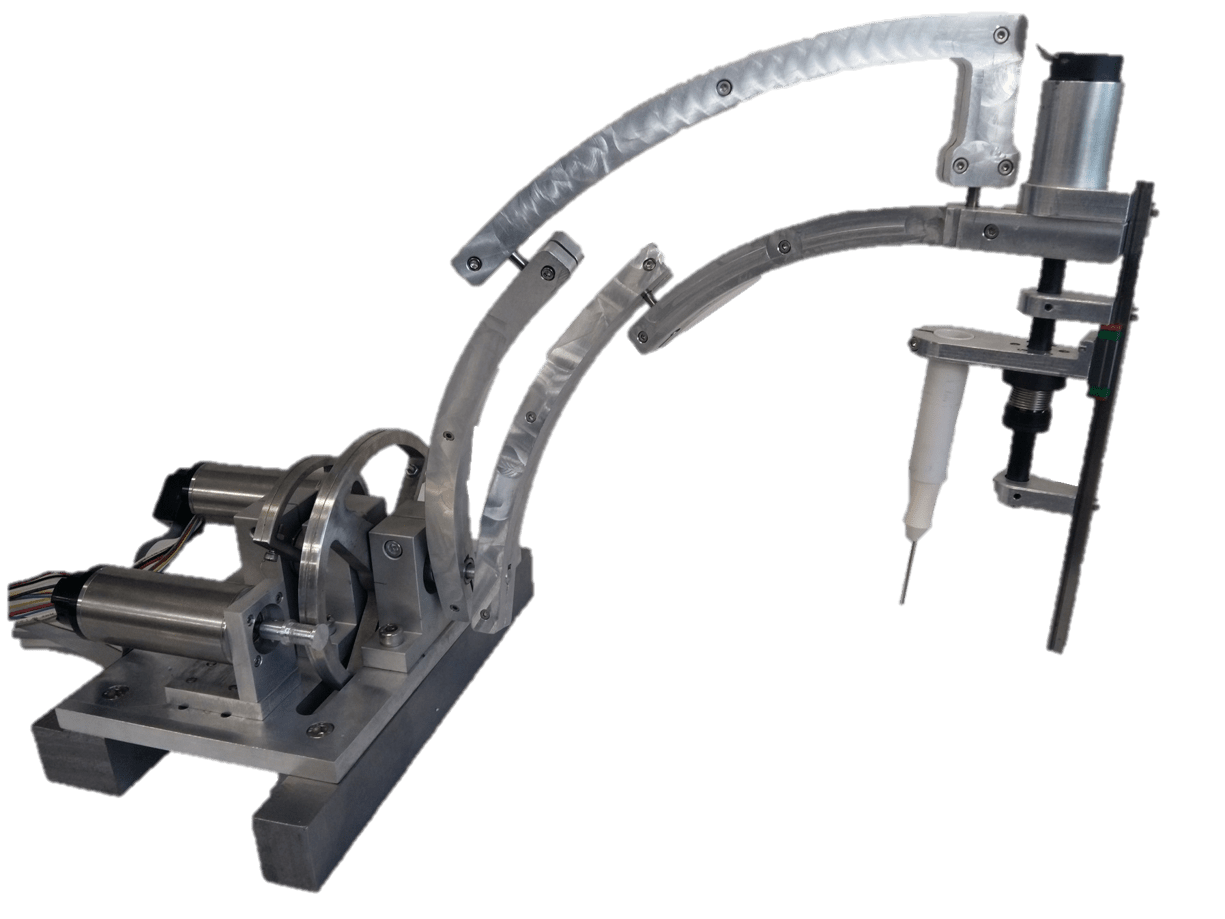
My current research focuses on Robotics and Robot Control. Currently, I am working on parallel robots utilizing in Robot-assisted eye surgery with a master-slave teleoperation system. Broadly speaking, my research interests are in the following areas:
- Robotics and Mechatronic Systems and Robots Control
- Robust H-infinity Control
- Fault Detection, Diagnosis and Isolation
- System Identification
- Computational Intelligence (Neural Networks and Fuzzy Systems)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}