EMG signal extraction and feature selection
EMG
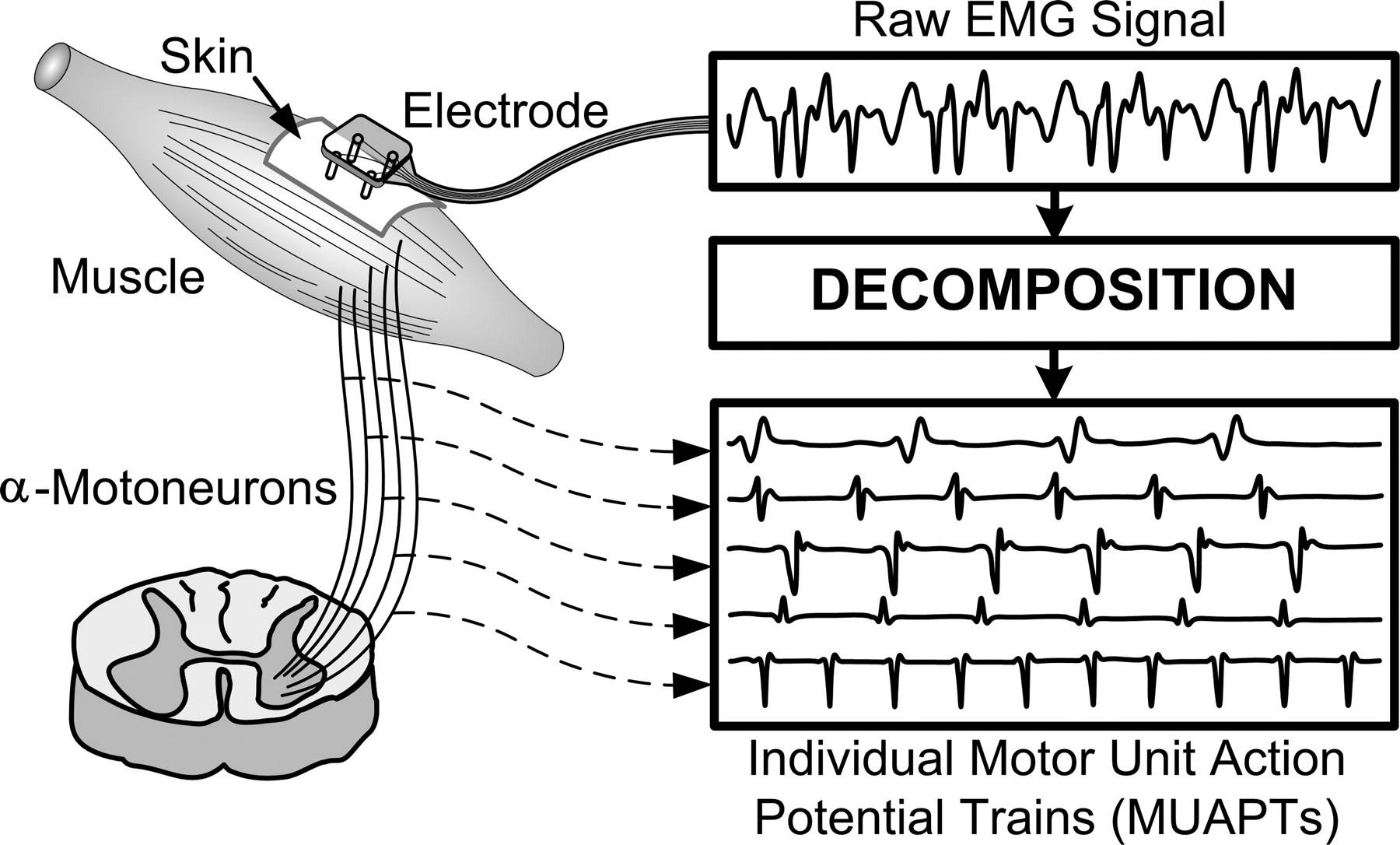
Electromyography (EMG) is a technique for evaluating and recording the activation signal of muscles. EMG is performed using an instrument called an electromyograph, to produce a record called an electromyogram. An electromyograph detects the electrical potential generated by muscle cells when these cells are both mechanically active and at rest. The signals can be analyzed in order to detect medical abnormalities or analyze the biomechanics of human or animal movement.
A real-time application of artificial neural network is to classify EMG signal in different arm motion. The neural network output represents a degree of desired muscle stimulation over a synergic, but enervated muscle. By means of this procedure, the network can learn to map a set of inputs to a set of outputs. The experimental result on the ANN classification method is given in the following table, as it is seen in this table the developed routine can classify the motion quite accurately with less than %4 error.
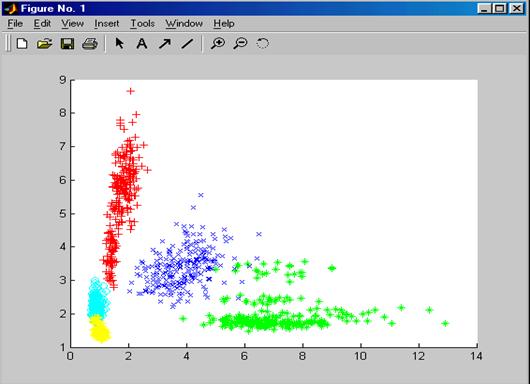
EMG signal classification
| Flexion | Extesion | Supination | Pronation | Rest | % Error | |
| Flexion | 211 | 0 | 5 | 0 | 0 | 2.31 |
| Extesion | 0 | 216 | 0 | 0 | 0 | 0 |
| Supination | 4 | 0 | 212 | 0 | 0 | 1.85 |
| Pronation | 0 | 0 | 0 | 210 | 6 | 2.78 |
| Rest | 0 | 0 | 0 | 7 | 209 | 3.24 |
Saeed Mahyad, Soheil Kianzad, Zahra Marvi, Sedighe Dehghani, Golnoosh Hosseini, Hoda Akbari, Mahboobeh Malekdoost, Zinab Khorasani.
Force Control of Intelligent Laparoscopic Forceps, Soheil Kianzad, Soheil O. Karkouti, and Hamid D. Taghirad, Journal of Medical Imaging and Health Informatics, Vol. 1, 284–289, 2011
Self-tuning dynamic impedance control for human arm motion, S Dehghani, HD Taghirad, M Darainy, Biomedical Engineering (ICBME), 2010 17th Iranian Conference of, 2010.
Neuro-musceleton model of below-elbow-arm and a new control topology for its cybernetic prosthesis, (pdf), H.D. Taghirad and S. Mahyad, 13th Int. Iranian Conference on Electrical Engineering, Vol 3. pp183-188, Zanjan.