
Flexible Joint Robot Test Bed
Later by implementation of a 2DoF Flexible robotic setup in the group, modeling, identification and robust control of flexible joint manipulators is pursued in this group. Robust PID, composite H-infinity controllers, QFT design, Robust Nonlinear H-infinity controller, and an extensive study on the FJR controller design especially considering actuator limitations on this system are some of the researches developed in this group. The other venue being examined in this research theme was the use of flexible link manipulators being used in tiny and effective surgical robotics applications currently being pursued by our Surgical Robotics.
Robust composite PID controller for Flexible Joint Robots
Multiple-axis robot manipulators are widely used in industrial and space applications. The high accuracy of these robots is due to their rigidity, which makes them highly controllable. After the inception of harmonic drive in 1955, and its wide acceptance and use in the design of many electrically driven robots, the rigidity of robot manipulators was greatly affected. In the early 1980s researchers showed that the use of control algorithms developed based on rigid robot dynamics on real non-rigid robots is very limited and may even cause instability. Singular perturbation theory is used as the basic theory to model the dynamics of flexible joint robots (FJRs), in which, using two-time scale behavior, these systems are divided into fast and slow subsystems.As shown in the literature for a three-axis flexible robot the system is not feedback linearizable and the use of methods such as computed torque methods for flexible manipulators is not directly implementable. By neglecting the effects of link motion on the kinetic energy of the rotor, Spong derived a mathematical model for such systems in which the system is feedback linearizable. However, to linearize the system, acceleration and jerk feedback is required, whose measurement is very costly. To avoid the need for acceleration and jerk in this method the idea of an integral manifold is employed. In this method, instead of using the zero-order approximation of the model extracted from the singular perturbation theory, higher-order models can be used and, hence, a series of corrective terms is added to the control algorithm. Composite control scheme is called to such controller algorithms with corrective terms.
Canadarm 2 a sample of highly flexible joint robot
In this research we proposed a method based on a composite control structure and thoroughly analyze the robust stability of the overall uncertain system. In this analysis the singular perturbation model of the FJR is used, but in the presence of the modeling uncertainties, and the system is divided into slow and fast subsystems. Then, an integral manifold in addition to a composite control law is introduced in order to retain the integral manifold invariant and to satisfy the asymptotic stability requirement. The control effort consists of three elements—the first element is designed for the fast subsystem, the second term is a robust PID control designed for the rigid subsystem and the third term is a corrective law designed based on the first-order approximation of the reduced flexible system. Moreover, unlike the stability analysis given in previous research, which was limited to the rigid model subsystem [16], in this the overall stability of the closed loop system is thoroughly analyzed-based on Lyapunov stability theory. Stability conditions for the robust PID controller are derived to guarantee that the overall closed-loop system is UUB stable. In order to verify the effectiveness of the proposed control law and compare its performance to other methods given in the literature, simulations of single- and two-link flexible joint manipulators are examined. It is shown in this study that the proposed control law ensures robust stability and performance, despite the modeling uncertainties. The details of the contoller structure is given in the following presentation (IROS04).
Selected Publications:
| Stability analysis and robust composite controller synthesis for flexible joint robots
HD Taghirad, MA Khosravi
Advanced Robotics 20 (2), 181-211
|
10 | 2006 |
| A robust linear controller for flexible joint manipulators
HD Taghirad, MA Khosravi
Intelligent Robots and Systems, 2004.(IROS 2004). Proceedings. 2004 IEEE/RSJ …
|
19 | 2004 |
| Design and simulation of robust composite controllers for flexible joint robots
HD Taghirad, MA Khosravi
Robotics and Automation, 2003. Proceedings. ICRA’03. IEEE International …
|
15 | 2003 |
| Stability analysis and robust composite controller synthesis for flexible joint robots
HD Taghirad, MA Khosravi
Intelligent Robots and Systems, 2002. IEEE/RSJ International Conference on 3 …
|
14 | 2002 |
| Modeling and robust control of flexible joint robots
MA Khosravi
ME Thesis, Department of Electrical Engineering, KN Toosi University of …
|
5 | 2000 |
| Stability Analysis and robust PID design for flexible joint robots
HD Taghirad, MA Khosravi, KN Toosi
INTERNATIONAL SYMPOSIUM ON ROBOTICS 31, 144-149
|
12 | 2000 |
Composite H∞ Controller for Flexible Joint Robots
One of main drawbacks of composite PID controllers for FJR’s are the required high control effort. In this part of research we proposed composite controller structure as in previous research results but designing an H∞ controller for the slow subsystem. The main significance of this research is providing a systematic approach to use the control effort limitations directly into controller synthesis. The representation of the nonlinear dynamics of the system in terms of a linear model and multiplicative uncertainty is elaborated in this research, and an H∞- based robust controller is designed for the system. By analyzing the performance of the closed-loop system, it is observed that, the low frequency content reference inputs are well tracked, with a limited control effort, while the controller synthesis enables the designer to make a suitable compromise between the required bandwith and the control effort limitation. Moreover, in order to have the benefits of composite control law in addition to that of H∞ synthesis, these methods are combined and a composite H∞ controller is designed for the system. Through a simulation study it is shown that the composite H∞ controller provides significant improvement in control effort, while satisfying both stability and performance requirements.
Selected Publication:
| Composite-H/sub/spl infin//controller synthesis for flexible joint robots
HD Taghirad, G Bakhshi
Intelligent Robots and Systems, 2002. IEEE/RSJ International Conference on
|
16 | 2002 |
Composite QFT Controller for Flexible Joint Robots
In this research nonlinear QFT approach is applied for controller design of FJR. It is first observed that the use of a stand alone QFT controller for the system causes large uncertainty templates, and hence, loop shaping within the bounds is infeasible. Hence, the use of a composite controller similar to that in previous research is proposed, but with a nonlinear QFT controller for slow subsystem. The structure of controller consists of three parts. A simple PD controller is used to stabilize the fast dynamics, and a QFT controller is used in addition to an integral manifold corrective term to perform on the slow dynamics. Because of the nonlinear dynamics of FJR and the proposed controller scheme, linear time invariant equivalent (LTIE) technique is used to assign a nominal model for the system with uncertainties templates. Design of the QFT controller, as slow part of the composite control law, is performed to compromise between the required bandwidth and the controller order. It is observed that this proposed structure is insensitive to structured variation of the plant, and only one design is sufficient for the full envelope. Moreover, any design limitations and the structure of the controller are apparent up front, and there is less development time for a full envelope design. Furthermore, one can determine what specifications are achievable early in the design process, and the changes in the specifications can be accomplished quickly in the redesign. The effectiveness of the proposed control topology is verified through various simulations. The details of the contoller structure is given in the following presentation (CCA05).
Selected Publication:
| Composite QFT controller design for flexible joint robots
HD Taghirad, H Rahimi
Control Applications, 2005. CCA 2005. Proceedings of 2005 IEEE Conference on …
|
9 | 2005 |
Nonlinear H∞ Controller for Flexible Joint Robots
In this research the nonlinear H∞ controller design for the FJR is studied in detail. The nonlinear H∞ control theory is a newly emerging nonlinear design approach in practical applications. Since in most physical systems nonlinear nature is observed, one of main advantage of the nonlinear H∞ theory over the linear control theories is the systematic consideration of system nonlinearities and uncertainties together, and thus robust stability and performance can be analyzed over a large operating region. Therefore, the nonlinear H∞ controller provides better potential for handling uncertain nonlinear control problems. Since the nonlinear H∞ controller does not support tracking requirements, a combinational method is proposed to accommodate this requirement. Moreover, the minimization of the control effort that is needed for regulation as well as tracking, is systematically encountered into controller synthesis. In this first the modeling procedure for an uncertain FJR is elaborated. Next through a short overview of nonlinear H∞ control methods, suitable controllers are designed and simulated for FJR. The obtained results show the effectiveness of the proposed controller in tracking performance, despite model uncertainties and external disturbances. The details of the contoller structure is given in the following presentation (CCA05).
Selected Publication:
| Nonlinear H//sub/spl infin//controller design for flexible joint robots
HD Taghirad, M Shaterian
Control Applications, 2005. CCA 2005. Proceedings of 2005 IEEE Conference on …
|
2 | 2005 |
Actuator saturation supervisory loop for Flexible Joint Robots
In order to come up with an online implementable controller for FJRs, a new composite controller, combined with a fuzzy logic supervisory loop has been proposed. In this topology, the anti-saturation logic is set to be “out of the main loop”, at a supervisory level, at the aim of preventing actuator saturation, despite preserving the essential properties of the main controller. This idea in a general form has been first published by the authors and then has been modified to use for FJRs. In this structure a PD controller is used to stabilize the fast dynamics and a PID controller is proposed to robustly stabilize the slow dynamics of the FJR. Moreover, a supervisory control loop is added to the structure, in order to decrease the bandwidth of the fast controller during critical occasions. It is observed in various simulations that by including this supervisory loop into the controller structure, the steady state performance of the system is preserved, and moreover, the supervisory loop can remove instability caused by saturation. The robust stability of the overall system in presence of the modeling uncertainties is then analyzed in detail, and it is shown that UUB stability of the overall system is guaranteed, only if the PD gains of the fast controller and the PID gains are tuned to satisfy certain conditions. This stability analysis is essential for susceptible applications of the FJRs such as space robotics, where the stability is a main concern. The details of the contoller structure is given in the following presentation (CCA05).
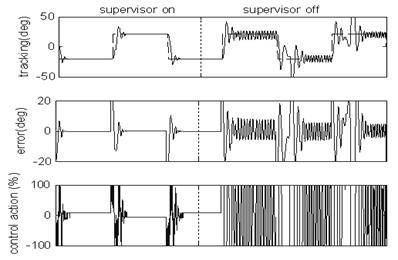
Performance of Fuzzy Supervisory Loop
| A survey on the control of flexible joint robots
S Ozgoli, HD Taghirad
Asian Journal of Control 8 (4), 332-344
|
104 | 2006 |
| Robust controller with a supervisor implemented on a flexible joint robot
HD Taghirad, S Ozgoli
Control Applications, 2005. CCA 2005. Proceedings of 2005 IEEE Conference on …
|
4 | 2005 |
| Robust stability analysis of FJR composite controller with a supervisory loop
S Ozgoli, HD Taghirad
Intelligent Robots and Systems, 2005.(IROS 2005). 2005 IEEE/RSJ …
|
2 | 2005 |
| Position control for flexible joint robots in presence of actuator saturation
S Ozgoli
Ph. D. Dissertation, KN Toosi University of Technology
|
10 | 2005 |
| Design of composite control for flexible joint robots with saturating actuators
S Ozgoli, HD Taghirad
Proc. IEEE Conf on Mechatronics and Robotics 2, 71-77
|
14 | 2004 |
| Fuzzy logic supervisory loop to remedy actuator saturation drawbacks
S Ozgoli, HD Taghirad
Proc. 16th Int. Conf. Syst. Eng, 537-541
|
14 | 2003 |
| Design and implementation of a position controller for a flexible joint robot in presence of actuator saturation
S Ozgoli
PhD thesis proposal, Electrical Eng. Dept., KN Toosi University of Technology
|
6 | 2003 |
Experimental identification and composite H∞ Controller for 2DoF Flexible Joint Robot
As the first step on the implementation phase, in this research, experimental identification of the 2DOF KNTU FJR is accomplished. In order to implement an H∞- based robust controller on the system, the nonlinear dynamics of the system is encapsulated in terms of a linear model and multiplicative uncertainty. The linear identification technique used in here is implemented using B&K Pulse analyzer platform. Design and implementation of composite H∞ controller is considered next. Implementation results shows the importance of correct phase identification in frequency response estimates. By this means a composite H∞ controller results into suitable closed loop performance.
Selected Publication
| H-infinity controller design for a flexible joint robot with phase uncertainty
S Dadashi, H Taghirad
Proc. 39th Int. Symp. Robot., 34-39
|
6 | 2008 |

This Group has enjoyed collaboration with many outstanding researchers in the world, including Prof. Pierre R. Belanger, Prof. Jorge Angeles, Prof. Vincent Hayward, McGill University, Canada.
Sadjaad Ozgoli, Mohammad A. Khosravi, Mehdi Khalkhali, Gholamreza Bakhshi, Mehdi Shaterian, habib Rahimi, Shirin Dadashi, Asghar Ataolahi, Alireza Moradian Lotfi.
Related Publications
| Title | Abstract | Year | Type | Research Group | |
|---|---|---|---|---|---|
| Fuzzy error governor: A practical approach to counter actuator saturation on flexible joint robots S. Ozgoli, H.D. Taghirad Mechatronics | Abstract: In this paper, a practical method to counter actuator saturation based on a fuzzy error governor is developed and a complete case study is considered. In addition to good performance, the method has two attracting properties: It does not change the structure of the main controller, and therefore, the theoretically proven characteristics of the system are untouched, and it is simply implementable in practice. The proposed controller structure is applied on a flexible joint robot (FJR). The robust stability of the closed loop system for an n-DOF FJR is thoroughly analyzed and the proposed controller is implemented on a laboratory setup to show the ease of implementation and the resulting closed-loop performance. The main controller used for the n-DOF FJR consists of a composite structure, with a PD controller on the fast dynamics and a PID controller on the slow dynamics. The bandwidth of the fast controller is decreased during critical occasions with the fuzzy logic supervisor, which adjusts the loop gain to a proper level. Using Lyapunov direct method, the robust stability of the overall system is analyzed in presence of modeling uncertainties, and it is shown that if the PD and the PID gains are tuned to satisfy certain conditions, the closed loop system becomes UUB stable. | 2009 | Journal | Flexible Robotics | |
| H-Infinity Controller Design for A Flexible Joint Robot With Phase Uncertainty Sh. Dadashi, H. D. Taghirad International Symposium on Robotics | Abstract: In this paper, the design and implementation of the H-Infinity controller for flexible joint robot (FJR) is presented and the capability of the controller to deal with actuator saturation is investigated in practice. The new procedure of design is introduced to avoid an instability caused by unmodeled phase behaviour which can not be encapsulated in multiplicative uncertainty. In order to avoid instability caused by unmodeled phase behaviour, the robust controller design is divided into two stages: H-Infinity controller design and checking closed loop sensitivity function. Simulation results reveal the capability of the controller to stabilize the closed loop system and to reduce the tracking error in the presence of the actuator limitation. | 2008 | Conference | Flexible Robotics | |
| A Survey on the Control of Flexible Joint Robots S. Ozgoli and H. D. Taghirad Asian Journal of Control | Abstract: The robotics literature of the last two decades contains many important advances in the control of flexible joint robots. This is a survey of these advances and an assessment for future developments, concentrated mostly on the control issues of flexible joint robots. | 2006 | Journal | Flexible Robotics | |
| Stability analysis and robust composite controller synthesis for flexible joint robots H. D. Taghirad and M. A. Khosravi Advanced Robotics | Abstract: The control of flexible joint manipulators is studied in detail. The model of N-axis flexible joint manipulators is derived and reformulated in the form of singular perturbations, and the integral manifold is used to separate fast dynamics from slow dynamics. A composite control algorithm is proposed for the flexible joint robots, which consists of two main parts. Fast control, u, which guarantees that the fast dynamics remains asymptotically stable, and the corresponding integral manifold remains invariant. Slow control, u, itself consists of a robust PID design based on the rigid model, and a corrective term designed based on the reduced flexible model. The stability of the overall closed loop system is proved to be UUB stable, by Lyapunov stability analysis. Finally, the effectiveness of the proposed control law is verified through simulations. It is shown that the proposed control law ensures robust stability and performance, despite the modeling uncertainties. | 2006 | Journal | Flexible Robotics | |
| Designing and Implementation of Mixed H2/H-Infinity Controller for Flexible Joint Robot to Encounter Actuator Saturation S. Ozgoli, H. D. Taghirad | Abstract: Mixed H2/H-Infinity method is proposed to design and implement a controller for flexible joint robots considering actuator saturation by considering the control action in the mixed sensitivity. A more advanced method based on frequency weighting of the control action contribution in the mixed sensitivity function is considered here which may result higher bandwidth. But this method is also limited and to get better specifications the H2/H-Infinity method is proposed. This methods are shown to be very good remedies for problems caused by actuator saturation in practice. Experimental studies are forwarded to verify the effectiveness and the performance of the proposed controllers in practice. | 2006 | Conference | Flexible Robotics | |
| Robust Controller with a Supervisor Implemented on a Flexible Joint Robot Hamid D. Taghirad and S.Ozgoli Control Applications | Abstract: In this paper a controller for flexible joint robots (FJR) in presence of actuator saturation is proposed, its robust stability is analyzed, and it is implemented on a laboratory FJR. This controller consists of a composite structure, with a PD controller on the fast dynamics and a PID controller on slow dynamics. The need of powerful actuator is released through decrease of fast controller bandwidth at critical occasions. This is done by means of a fuzzy logic supervisory loop. The stability analysis of the overall system is then analyzed by Lyapunov theory. It is proven that UUB stability of the overall system in presence of uncertainties is guaranteed, provided that the PD and the PID gains are tuned to satisfy certain conditions. Experimental studies are forwarded to verify the effectiveness and the performance of the proposed controller | 2005 | Conference | Flexible Robotics | |
| Composite QFT Controller Design for Flexible Joint Robots H. D. Taghirad and H. Rahimi Proceedings of 2005 IEEE Conference on Control Applications, 2005. CCA 2005. | Abstract: In this paper, a practical method to design a robust controller for a flexible joint robot (FJR) using quantitative feedback theory (QFT) is proposed. In order to control fast and slow dynamics of the FJR separately, composite control scheme is considered as the basis for the design. A simple PD controller is used to stabilize the fast dynamics, and a QFT controller is used in addition to an integral manifold corrective term to perform on the slow dynamics. Because of the nonlinear dynamics of FJR and the proposed controller scheme, linear time invariant equivalent (LTIE) technique is used to assign a nominal model for the system with uncertainties templates. Design of the QFT controller, as slow part of the composite control law is performed to compromise between the required bandwidth and the controller order. Comparisons with previous works on FJR, such as robust PID and composite Hinfin, illustrate the effectiveness of the proposed controller to reduce the tracking errors despite actuator limitations | 2005 | Conference | Flexible Robotics | |
| Nonlinear H-Infinity Controller Design for Flexible Joint Robots H. D. Taghirad and M. Shaterian Proceedings of the IEEE Conference on Decision and Control | Abstract: In this paper the design of a nonlinear H-Infinity controller for flexible joint robot (FJR) is presented. An approximate solution based on Taylor series expansion is considered for the Hamilton-Jacobi-Isaac (HJI) inequality. A two-degree-of-freedom controller combined of nonlinear H-Infinity controller and inverse dynamics controller is proposed to tackle the regulation as well as tracking problem in FJR. The proposed nonlinear H-Infinity controller attenuates the disturbance with a minimum achievable control effort, despite system parameter uncertainty. Simulation comparisons for single and multiple joint manipulators, show that the proposed controller yields to superior performance such as larger domain of attraction and smaller control effort as well as better tracking characteristics, compared to that of the other methods | 2005 | Conference | Flexible Robotics | |
| Robust Control for Flexible Joint Robots with A Supervisory Control to Remedy Actuator Saturation S. Ozgoli, H. D. Taghirad ICEE13 | Abstract: In this paper a controller design method for flexible joint robots (FJR), considering actuator saturation is proposed and its robust stability is thoroughly analyzed. This method consists of a composite control structure, with a PD controller on the fast dynamics and a PID controller on slow dynamics. Moreover, the need of powerful actuator is remedied by decreasing the bandwidth of the fast controller during critical occasions, with the use of a supervisory loop. Fuzzy logic is used in the supervisory law, in order to adjust the proper gain in the forward path. It is then shown that UUB stability of the overall system is guaranteed in presence of uncertainties, provided that the PD and the PID gains are tuned to satisfy certain conditions. | 2005 | Conference | Flexible Robotics | |
| QFT Controller Synthesis For A Nonlinear Flexible Joint Robot H. D. Taghirad and H. Rahimi | Abstract: In this paper, a practical method to design a robust controller for a flexible joint robot (FJR) using quantitative feedback theory (QFT) is proposed. In order to control fast and slow dynamics of the FJR separately, composite control scheme is considered as the basis for the design. A simple PD controller is used to stabilize the fast dynamics, and a QFT controller is used in addition to an integral manifold corrective term to perform on the slow dynamics. Because of the nonlinear dynamics of FJR and the proposed controller scheme, linear time invariant equivalent (LTIE) technique is used to assign a nominal model for the system with uncertainties templates. Design of the QFT controller, as slow part of the composite control law, is performed to compromise between the required bandwidth and the controller order. Comparisons with previous works on FJR, such that robust PID and composite H ?, illustrate the effectiveness of the proposed controller to reduce the tracking errors despite actuator limitations. | 2005 | Conference | Flexible Robotics | |
| Nonlinear H-Infinity Controller Synthesis for Flexible Joint Robots H. D. Taghirad and M. Shaterian ICEE | Abstract: In this paper the design of an optimal nonlinear H-Infinity controller for flexible joint robot (FJR) is presented. An approximate solution based on Taylor Series expansion is considered for the Hamilton-Jacobi-Isaac (HJI) inequality. A two-degree-of-freedom controller combined of optimal nonlinear H-Infinity controller and inverse dynamics controller is proposed to tackle the regulation as well as tracking problem in FJR. The proposed optimal nonlinear H-Infinity controller attenuates the disturbance with a minimum achievable control effort, despite system parameter uncertainty. Simulation comparisons for single and multiple joint manipulators, show that the proposed controller yields to superior performance such as larger domain of attraction and smaller control effort as well as better tracking characteristics, compared to that of the others. | 2005 | Conference | Flexible Robotics | |
| Robust Stability Analysis of FJR Composite Controller with a Supervisory Loop S. Ozgoli and H. D. Taghirad 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems | Abstract: In this paper, a controller design method for flexible joint robots (FJR), considering actuator saturation is proposed and its robust stability is thoroughly analyzed. This method consists of a composite control structure, with a PD controller on the fast dynamics and a PID controller on slow dynamics. Moreover, the need of powerful actuator is removed by decreasing the bandwidth of the fast controller during critical occasions, with the use of a supervisory loop. Fuzzy logic is used in the supervisory law, in order to adjust the proper gain in the forward path. It is then shown that UUB stability of the overall system is guaranteed in presence of uncertainties, provided that the PD and the PID gains are tuned to satisfy certain conditions | 2005 | Conference | Flexible Robotics | |
| Designing H2/H-Infinity Controller for Flexible Joint Robot to Remove Instabilities due to Saturation Sadjaad Ozgoli, H.D. Taghirad Annual (International) Mechanical Engineering Conference | Abstract: Mixed H 2 /H-Infinity method is proposed to design a controller for flexible joint robots (FJR) considering actuator saturation. By considering the control action in the mixed sensitivity function one can reduce the amplitude of the control action but this may affect all frequencies. A more advanced method based on frequency weighting of the control action contribution in the mixed sensitivity function is considered here which may result in higher bandwidth. But this method is also limited and to get wider bandwidth the H 2 /H-Infinity method is proposed. This method is shown to be a very good remedy to remove instabilities caused by actuator saturation. | 2005 | Conference | Flexible Robotics | |
| Design of Composite Control For Flexible Joint Robots With Saturating Actuators S. Ozgoli, H.D. Taghirad Iranian Conference on Fuzzy Systems | Abstract: In this paper a method of controller design for FJRs considering actuator saturation and other practical limitations is proposed. In the proposed method the need of powerful actuator is skipped over by decreasing the bandwidth of the fast controller during critical times. In order to accomplish this, a supervisory control is employed which uses fuzzy logic to adjust the proper forward path gain. This prevents instability caused by saturation without a great change in performance. All other practical considerations to make the controller implementable are taken into account and finally the performance of the proposed controller is verified through simulation. | 2004 | Conference | Flexible Robotics | |
| Design and Simulation of Robust Composite Controllers for Flexible Joint Robots H.D. Taghirad and M.A. Khosravi 2003 IEEE International Conference on Robotics and Automation | Abstract: In this paper the control of flexible joint manipulators is studied in detail. A composite control algorithm is proposed for the flexible joint robots, which consists of two main parts. Fast control, u/sub f/, which guarantees that the fast dynamics remains asymptotically stable, and the corresponding integral manifold remains invariant. Slow control, u, itself consists of a robust PID designed based on the rigid model, and a corrective term designed based on the reduced flexible model. The stability of the overall closed loop system is proved to be UUB stable, by Lyapunov stability analysis. Finally, the effectiveness of the proposed control law is verified through simulations. It is shown that the proposed control law ensure the robust stability and performance, despite the modeling uncertainties. | 2003 | Conference | Flexible Robotics | |
| Stability Analysis and Robust Composite Controller Synthesis for Flexible Joint Robots H.D. Taghirad and M.A. Khosravi Advanced Robotics | Abstract: In this paper the control of flexible joint manipulators is studied in detail. The model of N-axis flexible joint manipulators is derived and reformulated in the form of singular perturbation theory and an integral manifold is used to separate fast dynamics from slow dynamics. A composite control algorithm is proposed for the flexible joint robots, which consists of two main parts. Fast control, u f, guarantees that the fast dynamics remains asymptotically stable and the corresponding integral manifold remains invariant. Slow control, u s, consists of a robust PID designed based on the rigid model and a corrective term designed based on the reduced flexible model. The stability of the fast dynamics and robust stability of the PID scheme are analyzed separately, and finally, the closed-loop system is proved to be uniformly ultimately bounded (UUB) stable by Lyapunov stability analysis. Finally, the effectiveness of the proposed control law is verified through simulations. The simulation results of single- and two-link flexible joint manipulators are compared with the literature. It is shown that the proposed control law ensures robust stability and performance despite the modeling uncertainties. | 2002 | Conference | Flexible Robotics | |
| Composite-H? Controller Synthesis for Flexible Joint Robots H. D. Taghirad, Gh. Bakhshi Intelligent Robots and Systems | Abstract: In this paper a robust composite control algorithm is proposed for flexible joint manipulators, with the emphasis on satisfying control effort limitations. An H-Infinity framework is used for the slow subsystem controller design, instead of robust PID synthesis introduced in the literature. Linear identification techniques are used to represent the nonlinear dynamics of the system into a linear model plus multiplicative uncertainty. An H-Infinity controller is designed in the framework of composite control, in order to optimize the required control effort, along with satisfying robust stability and desirable performance. The effectiveness of the proposed control law is compared with other methods through a simulation study. The comparison results show a significant improvement in control effort, while satisfying both stability and performance requirements. | 2002 | Conference | Flexible Robotics | |
| Stability Analysis and Robust Composite Controller Synthesis for Flexible Joint Robots H.D. Taghirad and M.A. Khosravi Advanced Robotics | Abstract: In this paper the control of flexible joint manipulators is studied in detail. The model of N-axis flexible joint manipulators is derived and reformulated in the form of singular perturbation theory and an integral manifold is used to separate fast dynamics from slow dynamics. A composite control algorithm is proposed for the flexible joint robots, which consists of two main parts. Fast control, u f, guarantees that the fast dynamics remains asymptotically stable and the corresponding integral manifold remains invariant. Slow control, u s, consists of a robust PID designed based on the rigid model and a corrective term designed based on the reduced flexible model. The stability of the fast dynamics and robust stability of the PID scheme are analyzed separately, and finally, the closed-loop system is proved to be uniformly ultimately bounded (UUB) stable by Lyapunov stability analysis. Finally, the effectiveness of the proposed control law is verified through simulations. The simulation results of single- and two-link flexible joint manipulators are compared with the literature. It is shown that the proposed control law ensures robust stability and performance despite the modeling uncertainties. | 2002 | Journal | Flexible Robotics |