Minimally Invasive Vitreoretinal Surgery
Vitreoretinal surgery is an idiom in ophthalmology which is contained surgical process in the vitreous body and retinal space which is one of the most sensitive surgeries in eye surgery, especially surgeries near the retinal space. A common method in such surgeries followed by the art of a professional surgeon. The surgeon inserts an especial instrument through a small hole beside the eye cornea. The surgeon tries to reach the desired position to do the required task with rotating the instrument around the hole as a pivot point and moving that inward and outward. He uses his eye feedback using watching the process inside a microscope, which is located above the patient eye. There are lots of tremor in the human hand which is inevitable. Furthermore, there are many patients in the world whom it is not possible to reform their disability because their injury is located in the retinal space, and it is so dangerous to operate a minimally invasive surgery in this area by a human hand. Using a reliable robot to filter surgeon tremor and providing precise motion toward overcoming such difficulties is considered in this project.
Eagle Eye, a precise eye surgery mechanism
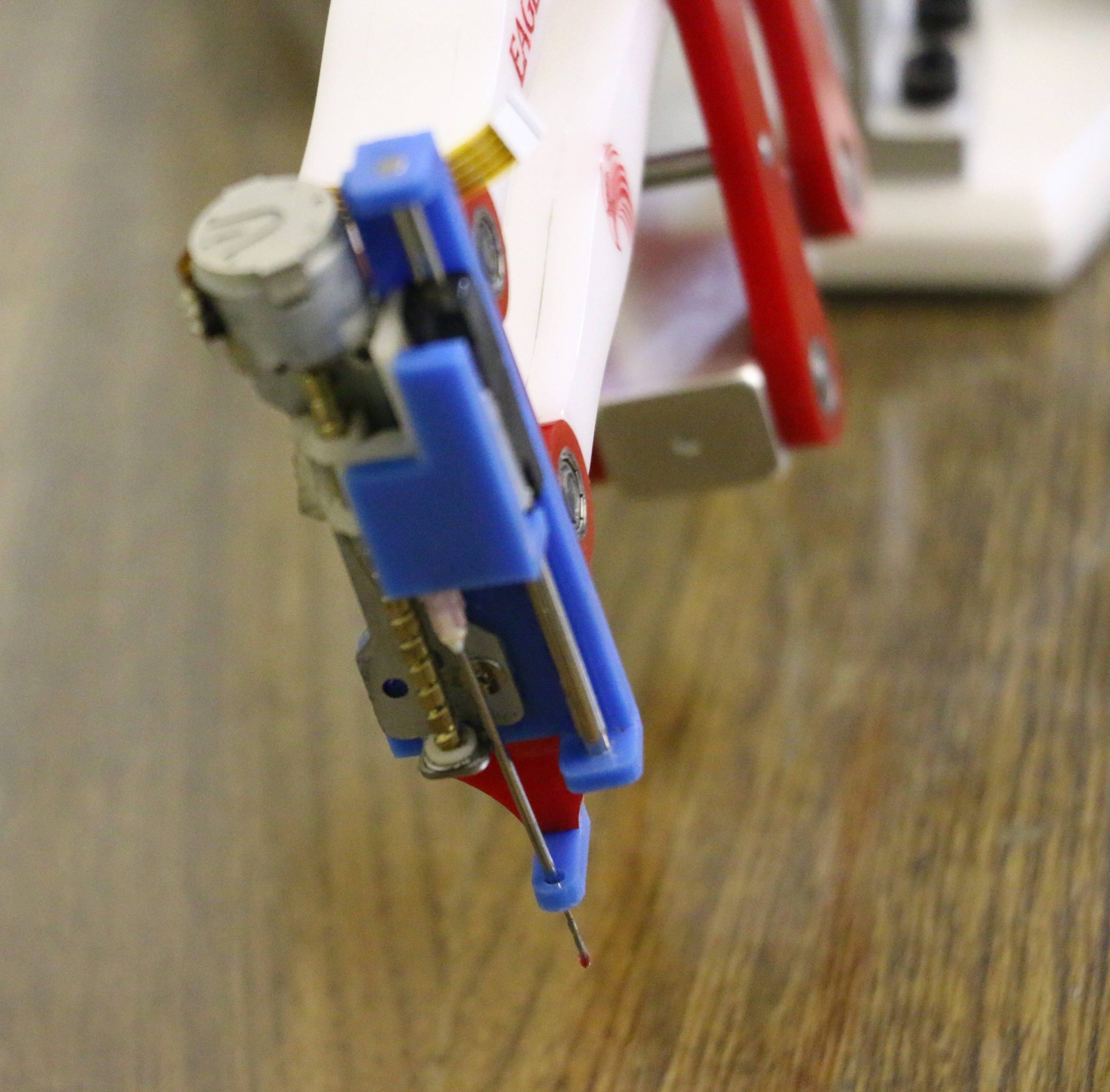
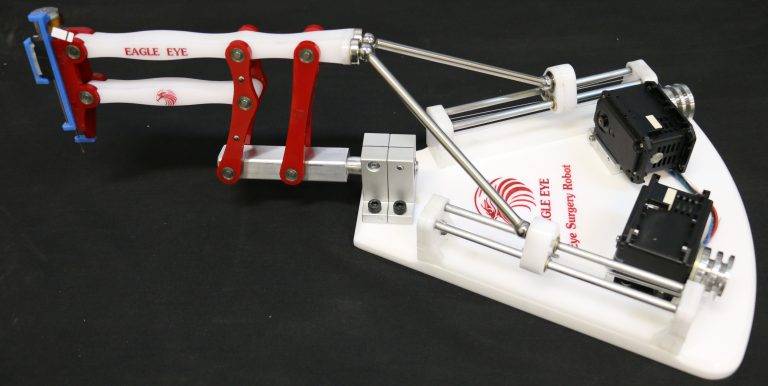
An initial design of the Eagle Eye Robot has been implemented. Many mechanical criteria besides available feasible workspace have been considered. In order to provide a precise motion in the end effector without any backlash, motion transformation of the actuators links to the parallelogram ones has been created using magnetic ball joints. In order to get access to a high resolution controlled motion, a cable driven system proposed. The RCM point and coordination of an instrument in a spherical space shown in the figure.
Minimally Invasive Vitreoretinal Surgery
Vitreoretinal surgery is an idiom in ophthalmology which is contained surgical process in the vitreous body and retinal space which is one of the most sensitive surgeries in eye surgery, especially surgeries near the retinal space. A common method in such surgeries followed by the art of a professional surgeon. The surgeon inserts an especial instrument through a small hole beside the eye cornea. The surgeon tries to reach the desired position to do the required task with rotating the instrument around the hole as a pivot point and moving that inward and outward. He uses his eye feedback using watching the process inside a microscope, which is located above the patient eye. There are lots of tremor in the human hand which is inevitable. Furthermore, there are many patients in the world whom it is not possible to reform their disability because their injury is located in the retinal space, and it is so dangerous to operate a minimally invasive surgery in this area by a human hand. Using a reliable robot to filter surgeon tremor and providing precise motion toward overcoming such difficulties is considered in this project.


{kind=link}
{kind=link}