Electrical Vehicles Group
The Electric Vehicle (EV) group has been established to develop control systems which improve performance and/or safety of electric-driven vehicles, such as cars, motorcycles, and buses. The studies include, among others, analysis of vehicle dynamics and vehicle design considerations, design of driving assistance systems such as anti-lock braking systems (ABS), traction control (TC) and electronic stability control (ESC) systems. It also includes Electric vehicle enabling technology covering the electric components and technologies important to the operation, performance and cost of the electric vehicle.
Electric vehicle group is, currently, working on electric motorcycles. EV benefits from collaboration of Shirvash Motor Industrial Group.
One of the current works focuses on motorcycle handling, i.e. to give a better feeling of cornering to the rider. Three main aspects of land vehicle dynamics are notable in this research: handling, roadholding and stability, which are mostly affected by vehicle geometry, tires, road and environment conditions, and the rider inputs. The requirements to maintain the three are contradictory and there shall be a compromise among them. In our research, mathematical analysis of motorcycle dynamics is used to speculate how handling, roadholding, and stability are related to the system parameters and variables. Using this insight, a handling index is introduced for applying to the problem of optimal handling, where roadholding and stability should pertain to an acceptable level. This nonlinear constrained optimization problem should be solved to give the ratio for a distribution of drive/break torque on the wheels.
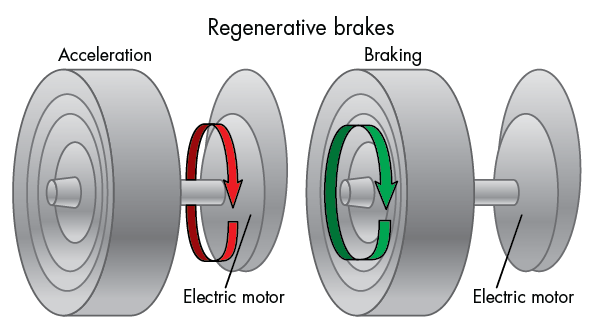
Another current work studies regenerative braking adapted specifically for electric motorcycles. Supervisory control and integration of the braking system with the energy source will be addressed in this study.