ARAS members recently presented our group’s work at the International Conference on Robotics and Mechatronics (ICRoM 2017) held in Amirkabir University, Tehran, Iran.
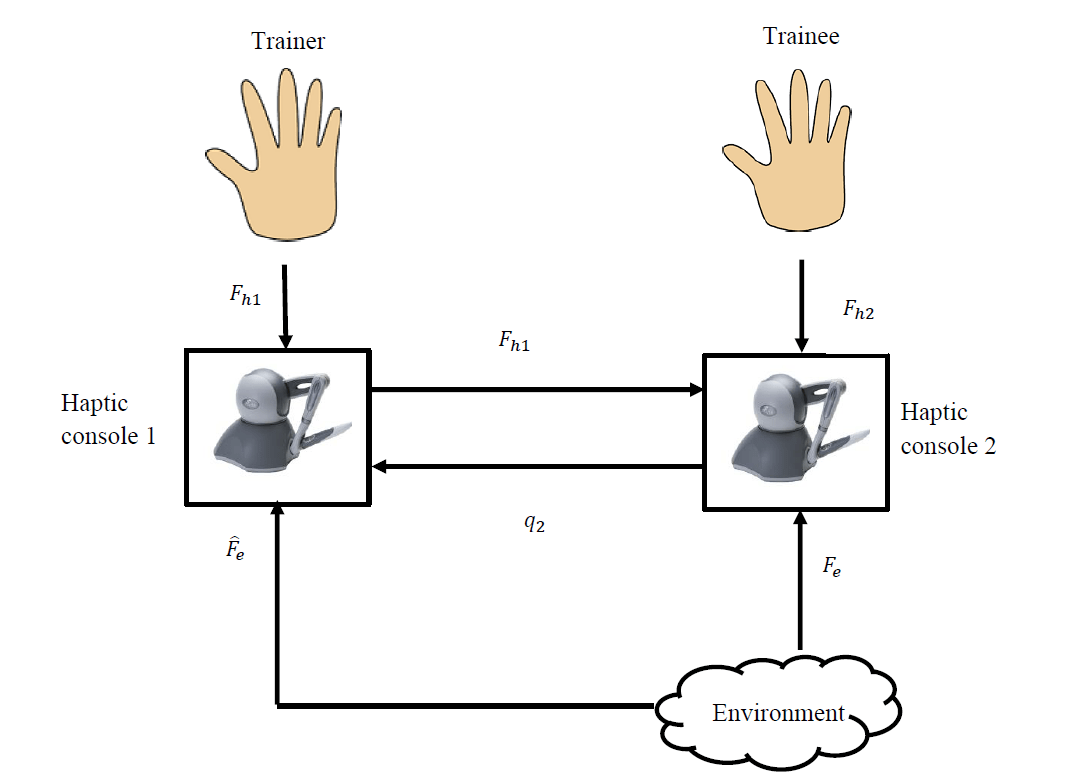
Mohammad Motaharifar, Hamid D. Taghirad. “An Observer-based Force Reflection Robust Control for Dual User Haptic Surgical Training System“
The paper is about controlling a dual user haptic surgical training system using a robust force reflection controller and a high gain observer. In addition, the stability of the closed-loop system is studied by means of the ISS stability theorem.
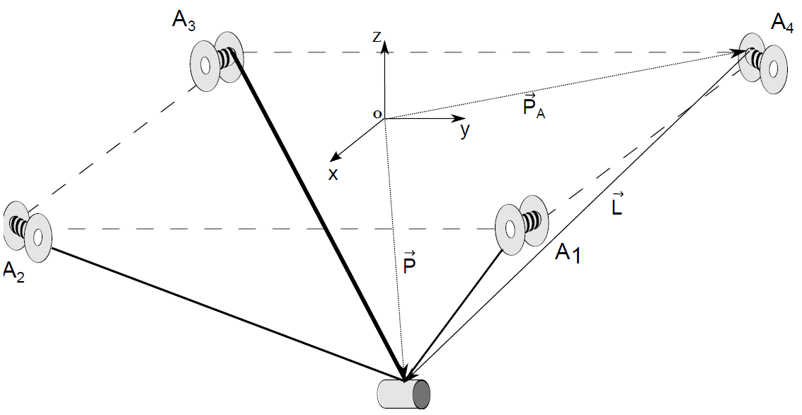
Ahmad Khalilpour, Alireza Bourbour, Rohollah Khorrambakht, Salman Kariminasab, Hamid D. Taghirad. “Forward Kinematics Resolution of A Deployable Cable Robot“
This paper analyses effects of parameters uncertainty on kinematic equations of a deployable cable driven robot. It addresses a least squares-based and a geometrical-based approach to study the uncertainty effects on the model.

Ali Noormohammadi Asl, Hamid D. Taghirad, Amirhossein Tamjidi. “Implementation of Multi-Goal Motion Planning Under Uncertainty on a Mobile Robot“
This work studies the multi-goal motion planning of a mobile robot where the robot should traverse through some goal points under uncertainty. It models the problem as a Travelling Salesman Problem (TSP) in the belief space. The TSP-FIRM algorithm is proposed to solve the problem and find a policy for the robot to perform its task fast and yet successfully. Furthermore, an algorithm is proposed to handle the online replanning in the cases such as map changes.
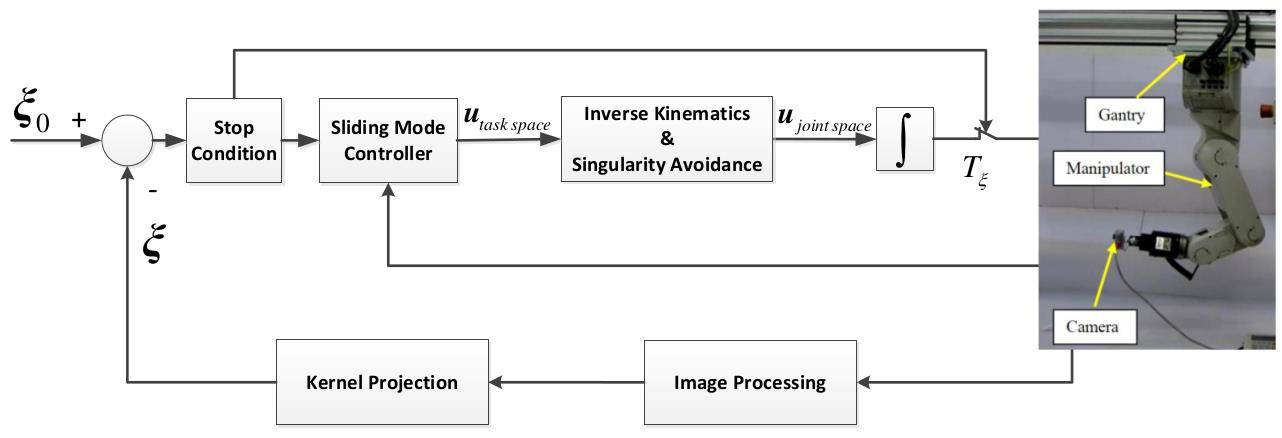
Mahsa Parsapour and Hamid D. Taghirad. “A Robust Approach Toward Kernel-Based Visual Servoing“
This paper is about designing a robust controller for kernel-based visual servoing systems in which the image uncertainties may well badly affect the system’s performance. Also, the effectiveness of the proposed controller is validated on an industrial robot.
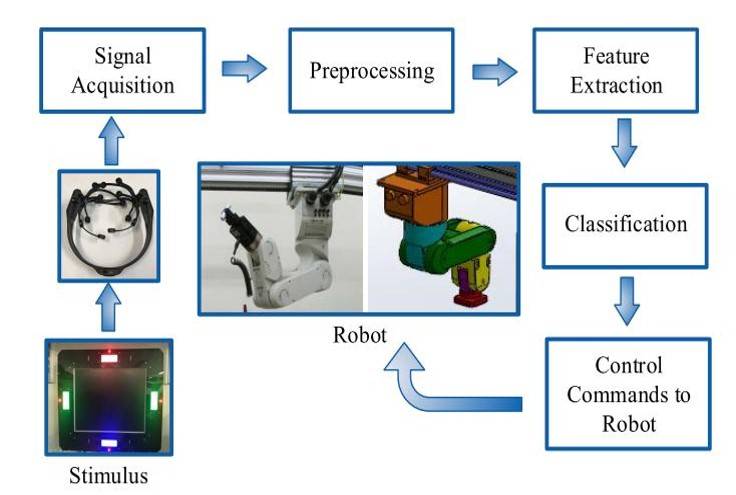
Fatemeh Akrami, Ebrahim Abedloo, Hamid D. Taghirad. “Brain-Computer Interface Control of a Virtual Robotic System based on SSVEP and EEG Signal“
In this study, the EEG signals are captured and used to send control commands to a virtual industrial robotic manipulator. The captured signals are processed by a feature extraction and a classification method (Likelihood Ratio Test). Having accomplished that, the signals are interpreted as meaningful commands to the robot.
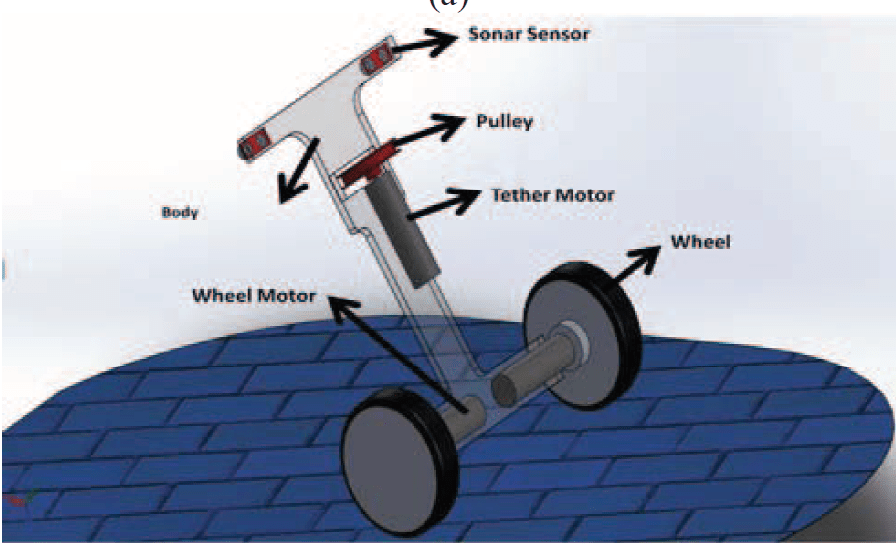
Mohammad H. Salehpour, Hamid D. Taghirad, Hadi Moradi. “Two PID-Based Controllers for a tethered Segway on Dome Shaped Structures”
This paper suggests two PID based controllers that satisfy the stability and desired performance condition for a tethered segway on dome-shaped structures. The proposed controllers are implemented in a simulation environment and their performance is compared with previously proposed controllers.
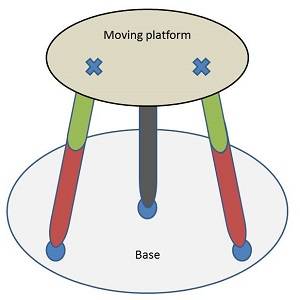
Mohammadreza Jafari Harandi, Hamid D. Taghirad Motion. “Control of an Underactuated Parallel Robot with First Order Nonholonomic Constraint”
this paper proposes a robust sliding mode controller for an underactuated wrist parallel robot, and suggests a new method for the forward kinematic problem without extra sensors. Also, it demonstrates the effectiveness of the proposed approaches in the simulation.


{kind=link}
{kind=link}