The Electric Vehicle (EV) group has been established to develop control systems which improve performance and/or safety of electric-driven vehicles, such as cars, motorcycles, and buses. The studies include, among others, analysis of vehicle dynamics and vehicle design considerations, design of driving assistance systems such as anti-lock braking systems (ABS), traction control (TC) and electronic stability control (ESC) systems. It also includes Electric vehicle enabling technology covering the electric components and technologies important to the operation, performance and cost of the electric vehicle.
Electric vehicle group is, currently, working on electric motorcycles. EV benefits from collaboration of Shirvash Motor Industrial Group.
One of the current works focuses on motorcycle handling, i.e. to give a better feeling of cornering to the rider. Three main aspects of land vehicle dynamics are notable in this research: handling, roadholding and stability, which are mostly affected by vehicle geometry, tires, road and environment conditions, and the rider inputs. The requirements to maintain the three are contradictory and there shall be a compromise among them. In our research, mathematical analysis of motorcycle dynamics is used to speculate how handling, roadholding, and stability are related to the system parameters and variables. Using this insight, a handling index is introduced for applying to the problem of optimal handling, where roadholding and stability should pertain to an acceptable level. This nonlinear constrained optimization problem should be solved to give the ratio for a distribution of drive/break torque on the wheels.
Another current work studies regenerative braking adapted specifically for electric motorcycles. Supervisory control and integration of the braking system with the energy source will be addressed in this study.

Core Projects
Optimal Handling using Longitudinal Distribution of Torque in Two-Wheeled Electric Motorcycle
Measures in the handeling of the vehicle evaluate the responsiveness of the vehicle to the driver/rider’s control input. It specifies how predictable the reaction of the vehicle is to the rider’s action. Handling characteristics mainly pertain to the horizontal forces acting in the contact patches of the tires with the road. It is common to use path curvature to obtain handling characteristics of four-wheeled vehicles in terms of the steering angle, at steady cornering maneuver. In this regard, the vehicles are classified to understeer, oversteer, and neutral steer. Handling performance of a vehicle can be evaluated via simulation and experiment through making a series of maneuvers with a range of inputs.
The notion of steady cornering handling characteristics has been extended to single-track vehicles. The difficulty of evaluating handling performance in motorcycles is that, besides path-planning, the rider should perform the essential task of modifying the dynamics of the system to reach equilibrium. Therefore, not every pre-specified input is applicable to the maneuver. Rider does not merely pose a difficulty on the handling evaluation process, but he alters the overall dynamics of the system through his riding style. Besides riding style, geometry, mass distribution, and tire characteristics are the main attributes that constitute handling performance of the motorcycle in normal ride. Our aim is to propose a handling metric that quantifies the motorcycle capability of respond to the rider’s command. This metric should encompass both the steady-state and transient response of the bike, and will be used to control the handling of the system.[/vc_column_text][/vc_column_inner]

PI: Saeedeh Ziapour
PI: Amirhossein Safari
Control System design of Two-wheel-drive Electric Motorcycle
I’m investigating motorcycle models and their behavior in order to define an handling index that can be optimized through online optimization methods. Meanwhile i’m trying to estimate some dynamics of motorcycle that are hard to be measured or their measurement costs a lot or is not accurate. Because of complexity of motorcycle models, Neural Network approach can be helpful in these estimations.
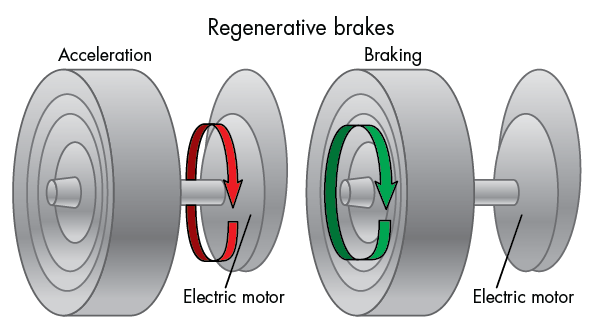
Design and Implementation of Regenerative–Friction Braking System on an Electric Motorcycle to Optimize Battery Life and Brake-to-Battery Charging
For reducing speed and stopping a transportation vehicle, the existence of brake is necessary. In electrical vehicles, instead of wasting the energy in friction brakes and transforming it to heat, we can use a fraction of this energy to charge the battery. With respect to the reliability of braking, the friction brakes are not replaced by regenerative brakes and we use both of them together. In this thesis, the design and implementation of integrated system of friction-regenerative brakes is conducted with the purpose of gaining maximum level of energy by considering the increase of life-cycle of the battery and providing the reliability of braking in electrical motorcycles.
PI: Amirhossein Samii