Robot-assisted eye surgery with a master-slave teleoperation system
Robot-assisted eye surgery with a master-slave teleoperation system is investigated in this research. The actual surgery is performed by the slave robot utilizing the commends applied by the surgeon on the master robot. Robotic-assisted surgery has the following advantages over the manual surgery
-
- Filtering Tremor
- Scaling of Position and Force
- Enhanced sensitivity through haptic feedback
- providing the surgeon an ergonomic body posture
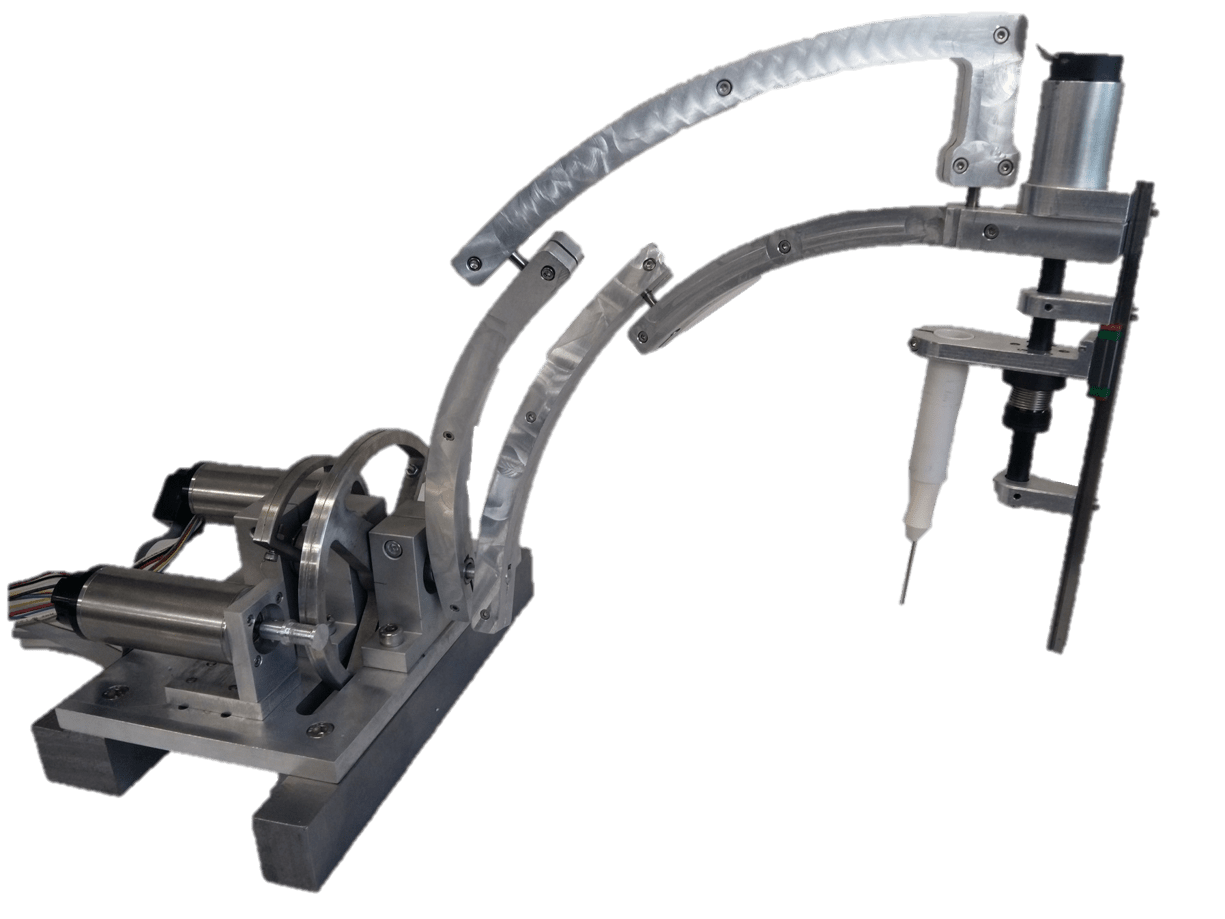
Since the slave robot is designed to perform Minimally Invasive Surgeries, the Remote Center of Motion (RCM) is provided by the mechanical solutions. Most of the eye surgery robotic systems such as preceyes, Steady-Hand, etc have utilized parallelogram mechanism to provide RCM. However, a different methodology based on the spherical mechanism is followed in this research to provide RCM. The capstan drive mechanism is utilized to provide a back-drivable transmission mechanism with high accuracy and zero backlashes.
Another aspect of this project is designing the control architecture for the teleoperation system. It can be verified that the control of teleoperation systems is complicated due to a lot of challenges. The dynamics of master and slave robots are often nonlinear and subject to uncertainty. Another cause of the difficulty is the uncertainty presents in the interaction of these robots with an unknown and widely varying operator and environment dynamics. Finally, the communication time delay in telerobotic applications is the main obstacle to maintain both transparency and stability of the system. Communication time delay causes a trade-off between stability and transparency.
Several approaches are followed to design the controller. One methodology is to design a sliding mode impedance controller and analyze its stability by the Lyapunov theory. In this method, the sliding mode impedance controller is utilized to achieve the desired impedance in the presence of various uncertainties in the dynamics of the system. The stability analysis in the presence of time delay is proved via Input-to-State Stability (ISS) methodology. Another approach is to utilize a Model Mediated Teleoperation (MMT) framework. This technique facilitates combining sources of knowledge and provides the opportunity of accessing whole information of model parameters. This approach is completely beneficial in telesurgery applications. In this method, the parameters of environment dynamic are identified using Bayesian approaches. The full probability distribution is obtained from the whole existing knowledge. These hyperparameters are passed to the master virtual model through a communication channel to render the local environment dynamic. Controller parameters are tuned based on probabilistic robust, minimizing the risk of instability and violation of performance index. Several projects have been conducted based on the two mentioned approaches with experimental validation.

{kind=link}