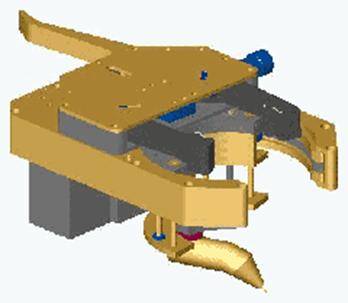
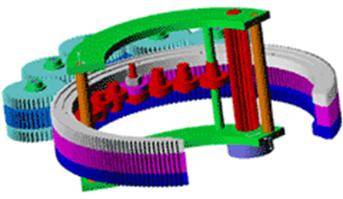
Automatic Pipe Welding Robot
This robot is designed on a contract with Azarab Industries, Arak, Iran. One of main productions of Azarab Industries are power plant boilers, in which numerous pipes in different size and shapes must be welded with high precision. This robot automates welding of two perpendicularly intersecting pipes in a very limited maneuvering space.