ARC for single stage HDD
In this research a unifying controller structure is used based on Adaptive Robust Control (ARC). The algorithm is easily implementable as a unified embedded controller on both seeking and following modes. The proposed new ARC controller has important advantages such as separating robust control design from parameter adaptation process, reducing the effect of measurement noise on the tracking, making adaptation process faster, and reducing the need for feed forward control in seeking time. The controller also takes into account the delay in seeking time, the model uncertainties and the effect of pivot friction. In order to fulfill high performance requirements, the model considered in controller performance verification, includes most significant nonlinear effect, namely the friction and high frequency resonant, hence the simulation results are promising to work well in practice.To increase the Hard Disk Capacity a very precise tip motion control of the Hard disk read/write head tip is required. This accuracy requirement is increasing by ever increasing hard disk capacity, and for commercial hard disks it is now a few microns. Considering the speed of the disk, and very minor air gap between the disk and read/write head, reaching to this accuracy is very challenging, and comparable to maneuvering a F16 military aircraft within a few meters above the ground!
ARC for dual-stage HDD
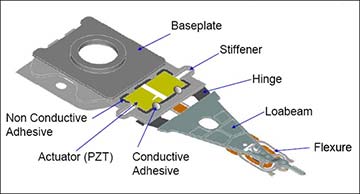
The dual-stage actuation system offers one way to enlarge the servo bandwidth. Using high bandwidth secondary actuators mounted on the voice coil motor (VCM) has been investigated for many years, and is regarded as a feasible alternative to single stage servo systems. In this line of research, a dual-stage hard disk drive system is considered, in which a push-pull type piezo-electric transducer (PZT) is used as a second-stage actuator, in addition to the first-stage VCM. The VCM has a large operating range and a low resonance frequency, and is used for coarse positioning. The PZT actuator has a small operating range and a high resonance frequency, and is used for fine positioning.
As explained in above, adaptive robust controller are developed for single-stage hard disk servo systems, and by introducing dynamic adaptation into the adaptive structure of such controllers promising results in terms of fast and accurate tracking performance in presence of modeling uncertainty is obtained. In this research, this approach is implemented for the dual-stage disk drive servo system, and its closed loop performance is compared to that of ARC in presence of modeling uncertainty. To verify the robustness of such algorithms, experimentally verified models for the system, is used in the simulations. The simulation results applied on this model is promising to work well in practice. This topic is currently under further developments. For the obtained results so far, refer to the following publication.
In this research group we enjoyed collaborating with internationally recognized researchers including Herrmann, G.; Turner, M.C.; Postlethwaite, I.; Guoxiao Guo.
Performance clip (8 M)
Related Publications
| Title | Abstract | Year | Type | Research Group | |
|---|---|---|---|---|---|
| Adaptive Robust Backstepping Control Design for A Non-minimum Phase Model of Hard Disk Drives M. Ataollahi, H. H. Eghrari and H. D. Taghirad 2011 19th Iranian Conference on Electrical Engineering | Abstract: In this paper, a new adaptive robust approach for non-minimum phase systems is proposed, based on the synthesis algorithm of dynamical backstepping design procedure. The previously proposed adaptive robust backstepping method has a limitation in stabilization of non-minimum phase systems, which is removed in this paper. The dynamic model of the voice coil motor actuator, which is used in the read/write head of hard disk drive, is considered as a case study to apply the proposed method. A simple but accurate model of this system is presented the proposed control method is applied onto this model. Simulations are performed for the embedded control system of hard disk drives. The obtained results verify the effectiveness of the proposed control law in terms of transient performance, tracking errors, and disturbance rejection, in both track seeking and track following modes. | 2011 | Conference | Hard Disk Drives Control | |
| Robust Performance Verification of Adaptive Robust Controller for Hard Disk Drives Hamid D. Taghirad and Ehsan Jamei IEEE Transactions on Industrial Electronics | Abstract: An adaptive robust controller (ARC) has been recently developed for read/write head embedded control systems of hard disk drives (HDDs). This structure is applicable to both track seeking and track following modes, and it makes the mode switching control algorithms found in conventional HDD servosystems unnecessary. An Improved Desired Compensation ARC (IDCARC) scheme is proposed in this paper, in which the traditional ARC is powered by a dynamic adaptive term. In this approach the adaptation regressor is calculated using reference trajectory information. Moreover, a robust analysis of this method is developed, in which a controller designed based on a simple model of the system is verified in a closed loop performance of a more comprehensive model of the system. The simulation result verifies the significant improvement of the performance of IDCARC compared to that of ARC and its robustness for this model. It is observed that in the presence of large disturbances the proposed method preserves the stability and a suitable performance while the ARC fails even in stability. | 2008 | Journal | Hard Disk Drives Control | |
| Adaptive Robust Controller Design for a Dual Stage Hard Disk Drive Hamid D. Taghirad and P. Sheykholeslami Advanced intelligent mechatronics | Abstract: In this paper, adaptive robust controllers are proposed for dual-stage hard disk drives. An improved desired compensation ARC (IDCARC) scheme is proposed in this paper for both actuators of the system, in which the traditional ARC is powered by a dynamic adaptive term. Moreover, a simulation study of these controllers are presented, in which the controllers designed based on simple models for the subsystem are implemented on a more comprehensive, experimentally verified models of the system. Simulation result verifies the effectiveness of the IDCARC method in providing the required tracking, in presence of unstructured uncertainty for the models. | 2007 | Conference | Hard Disk Drives Control | |
| Adaptive Robust Controller Design For Dual-Stage Hard Disk Drives H. D. Taghirad and P. Sheykholeslami Advanced intelligent mechatronics | Abstract: In this paper, adaptive robust controllers are proposed for dual-stage hard disk drives. An improved desired compensation ARC (IDCARC) scheme is proposed in this paper for both actuators of the system, in which the traditional ARC is powered by a dynamic adaptive term. Moreover, a simulation study of these controllers are presented, in which the controllers designed based on simple models for the subsystem are implemented on a more comprehensive, experimentally verified models of the system. Simulation result verifies the effectiveness of the IDCARC method in providing the required tracking, in presence of unstructured uncertainty for the models. | 2007 | Conference | Hard Disk Drives Control | |
| Robust Performance Verification of IDCARC Controller for Hard Disk Drives H. D. Taghirad and E. Jamei | Abstract: Adaptive robust controller (ARC) has been recently developed for read/write head embedded control systems of hard disk drives (HDD). This structure is applicable to both track seeking and track following modes, and it makes the mode switching control algorithms found in conventional HDD servo system unnecessary. An Improved Desired Compensation ARC (IDCARC) scheme is proposed in this paper, in which traditional ARC is powered by a dynamic adaptive term. In this approach the adaptation regressor is calculated using reference trajectory information. Moreover, a robust analysis of this method is forwarded, in which a controller designed based on a simple model of system is verified in closed loop performance of a more comprehensive model of the system. Simulation result verifies the significant improvement of the performance of IDCARC compared to that of ARC and its robustness for this model. It is observed that in the presence of large disturbances the proposed method preserves stability and performance while the ARC fails even in stability. | 2006 | Journal | Hard Disk Drives Control | |
| Adaptive Robust Controller Synthesis for Hard Disk Servo Systems H. D. Taghirad and E. Jamei Intelligent Robots and Systems, 2004 | Abstract: Adaptive robust controller is proposed for read/write head systems for hard disk drives (HDD). This structure can be applied to both track seeking and track following modes, and it makes the mode switching control algorithms proposed in conventional HDD servo system unnecessary. This controller theoretically guarantees a prescribed transient performance and tracking in presence of parametric uncertainties. An improved desired compensation ARC (IDCARC) scheme is then proposed, which has powered by a dynamic adaptive term compared to DCARC. The regressor is calculated using reference trajectory information. This has been done by structural vibration minimized acceleration trajectory control method. Simulation result show that the dynamic adaptation mechanism in IDCARC provide better performance compared to that of ARC, DCARC and the conventional servo system with mode switches control law. | 2004 | Conference | Hard Disk Drives Control |