The Platform
The chosen platform is an automatic vehicle called Quick from SAIPA corporation in Iran. This product enjoys the benefits of being equipped with modern, comfort and safety-related features and is being produced with regards to international standards. Added features on this model include features such as push-button start system, 7-inch touch screen, cruise control, Bluetooth port, multi-mode driver power seat, automatic transmission system and numerous other options.
Project Progress
The platform is ready for test procedures. Required hardware is prepared and the CAN bus is used for data transmission. Furthermore, a camera is mounted behind the car front glass for further data gathering purposes.
The software development process is done. A deep learning-based object detection software is developed for the detection of objects and estimation of their distance to the car.
Gathering the dataset has been finished. The dataset consists of both image and radar data synchronized in domestic urban environments in Tehran, Iran.
Hardware
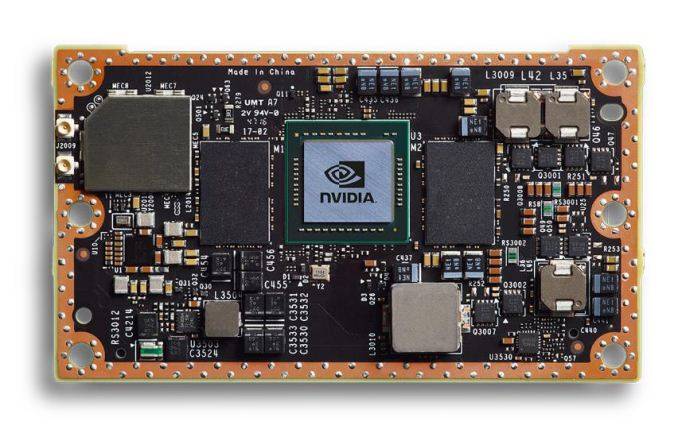
Nvidia Jetson TX2 is used as a computing device. A USB 3.0 camera is connected directly to the Jetson board in order to capture the images with proper performance.
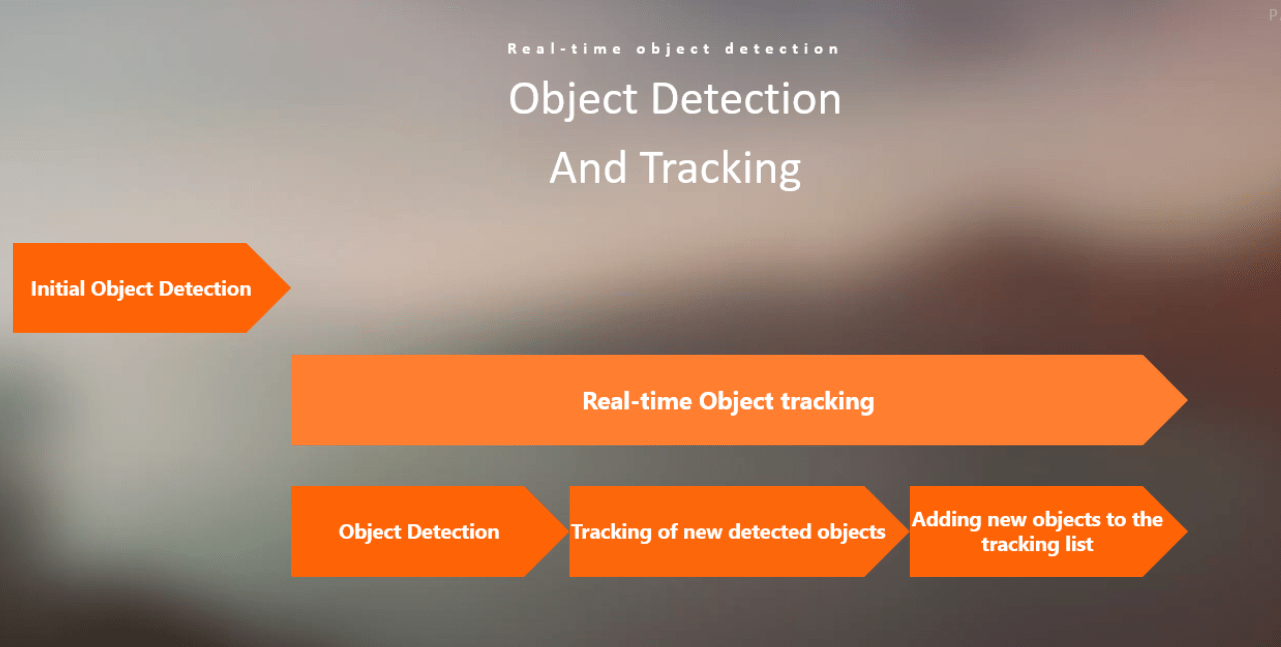
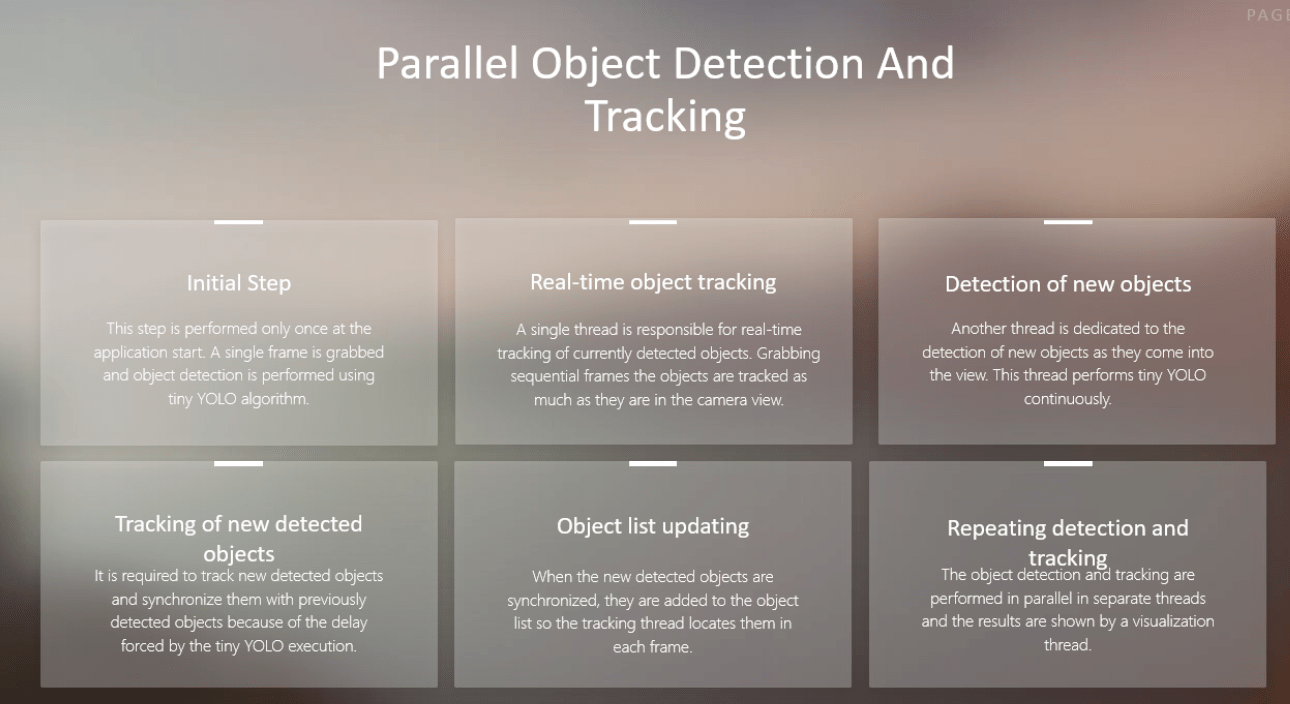
Object Detection with YOLO
Several versions of YOLO have been presented in the literature each having a special architecture and characteristics. It can be said that the main purpose of these various structures is to provide flexibility to choose between speed and accuracy depending on the application. Deep learning-based object detection is performed by YOLO V2 trained on the local road scene objects such as domestic cars. YOLO V2 detects objects on the Jetson TX2 in a 12 FPS with good accuracy (The darknet implementation). To further enhance the execution speed of the algorithm, a tracking paradigm consisting of YOLO + an OpenCV tracker has been implemented and used instead of a single YOLO V2. As a result, the system works on the Nvidia Jetson TX2 in a nearly 17 FPS speed. The object detection results are acceptable and promising. Using this method, cars are detected in a road scene on Sadr Highway, Tehran, Iran. The detected objects are marked by a green bounding box.
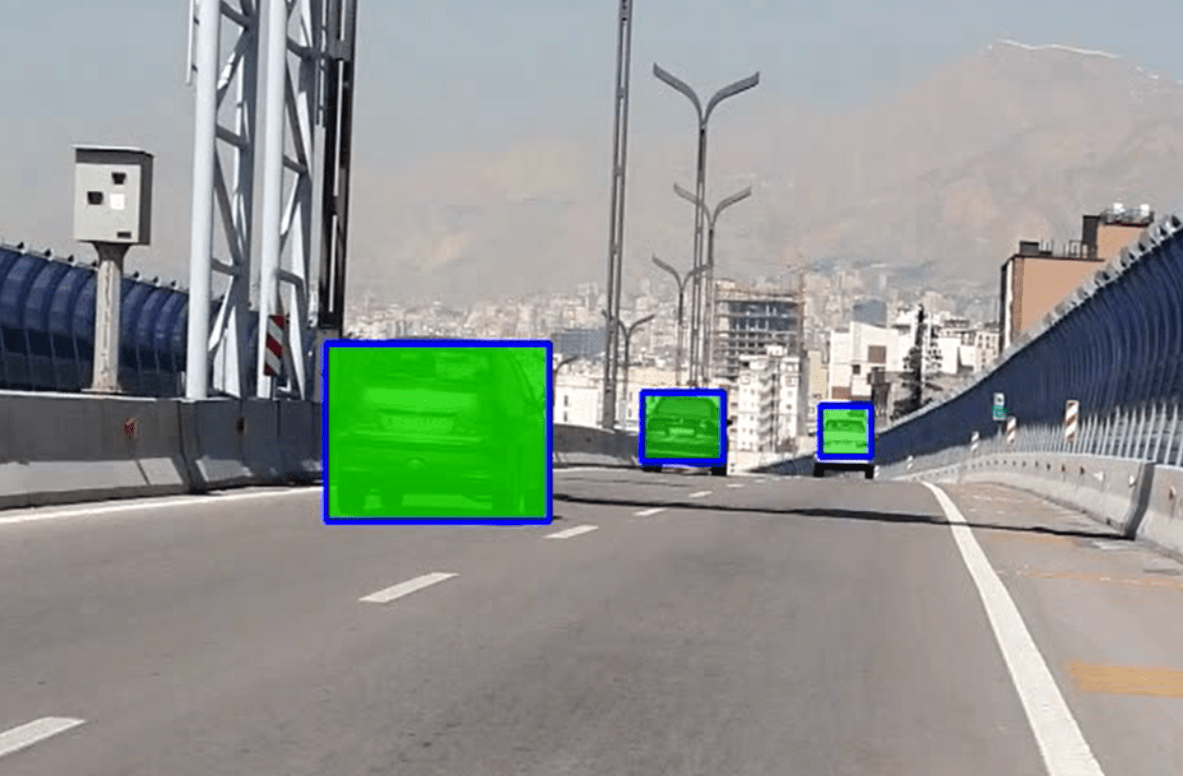
Video recording of the quick primary test on Sadr Highway, Tehran.