The surgical robotics group aims at developing new robotics-based technologies for robot-assisted surgery and surgery training applications. This includes the design and integration of mechanical and electrical components as well as the development of innovative control structures for these systems. These robotic systems will enhance the safety and efficiency of medical surgeries which leads to more satisfaction in all of the people dealing with the healthcare systems especially the patients, the surgeons, and the residents. This group has enjoyed the collaboration and consultation of several national and international partners in the fields of engineering and medical science.
Current Projects
The major focus of surgical robotics team is the design and construction of devices to make surgical procedures and surgical training more accurate, effective and less invasive. The current project followed in our team is the design and evaluation of a novel haptic feedback system for facilitating eye surgery training. Undoubtedly, our collaboration with the Farabi Eye Hospital, the Center of Excellence in Ophthalmology, is a valuable and constructive asset for this project. This project involves the design and integration of mechanical and electrical systems and the development of advanced control frameworks for these systems. In addition, the following projects are the most recent projects conducted in our research group:
-
-
- Surgery Training Haptic System
- Design and implementation of a cooperative adaptive control structure for ARAS haptic eye surgery training system
- Presentation and implementation of performance evaluation procedure ARAS Haptic System for eye Surgery Training (ARASH: ASiST)
- Design and implementation of impedance control of the dual-user system for eye surgery training
- Eye surgery performance evaluation and improvement using artificial intelligence (AI)
- investigation of the metrics and methods of surgical skill assessment in the Eye Surgery Haptic System
- Deriving Dynamics of the Eye Surgical Robot for Real-Time Control Purposes
- Sliding mode impedance control design for teleoperation systems
-
Development of Skill-Based Video Dataset, Deep Learning Research on Video-Based Cataract Surgery Training and Skill (Quantity and Quality) Assessment
-
Development of the Surgical Metrics and Implementation of Skill Assessment Methods in the Eye Surgery Haptic Training System
-
Evaluation of surgical skills in facilitating haptics system of ARAS surgery training using machine learning algorithms
- Dynamic Modeling and Calibration of ARASH:ASiST: ARAS Haptic System for Eye Surgery Training
-
Surgery Training Haptic System
My Ph.D. thesis deals with the control structure design for the eye surgery training haptic system. Due to the interaction between the users in the dual user haptic systems, the decision of each user is affected by the other user. However, most of the related studies use a general tele-operation architecture which is not customized for surgery training. In addition, most of the research reported in the literature are based upon linearity of the system which is an unrealistic assumption. Hence, it is highly beneficial to develop a control architecture based on special requirements of surgery training and analyze its stability as a nonlinear system. This is the objective of my thesis.
Project Manager: Mohammad Motaharifar
Project Manager: Arash Iranfar
Design and implementation of a cooperative adaptive control structure for ARAS haptic eye surgery training system
In my thesis design and implementation of a dual user surgery training framework, is discussed. One of the users is a novice surgeon who is learning the procedure by watching and feeling the movements that the other user, which is an expert surgeon, is doing. The training system consists of two identical haptic devices which are connected to each other via a fast and reliable communication channel. The embedded system that is managing the communication can control either of the haptic devices according to a predefined training routine. Three virtual fixture based cooperative control schemes are proposed and compared, and the stability of each is analyzed using passivity and ISS approaches. Moreover, the design and implementation process of the embedded system is discussed and the results for implementing one of the abovementioned approaches are presented.
Eye surgery performance evaluation and improvement using artificial intelligence (AI)
Skill assessment and transfer in eye surgery is one of the important considerate goals in surgery training and evaluation. ARAS Haptic System has implemented and developed in Surgical Robotic group of ARAS lab. These haptic devices can measure position and insertion force of tool that can be very useful in practical skill assessment. Based on eye surgery, especially vitrectomy, there are some important and necessary skills for novices like path length, tool’s speed in the entry point, depth perception, motion smoothness, applied forces and etc. I am studying some kinematic and dynamic parameters that can describe the movements well and they were reliable and valid in a practical skills assessment.
Project Managers: Hamed Sadeghi, Parisa Hasani, and Mohammad Javad Ahmadi

Project Manager: Mohammad Javad Ahmadi
Development of Skill-Based Video Dataset, Deep Learning Research on Video-Based Cataract Surgery Training and Skill (Quantity and Quality) Assessment
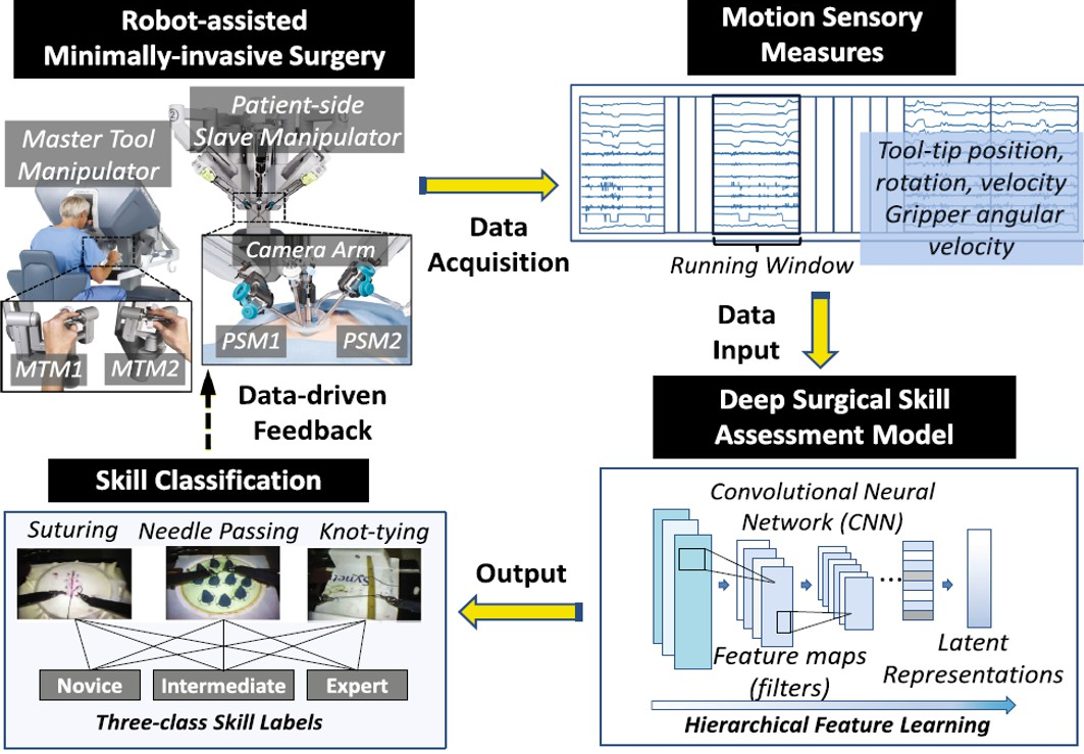
Approach: The eye lens works like a camera lens, focusing the light on the retina at the back of the eye. The blurring of the eye lens is called a cataract. Cataract surgery is currently one of the most common surgeries performed in the medical field. In cataract surgery, a blurred eye lens of a patient is replaced with a transparent synthetic lens. Today, Phacoemulsification is the most common method used for cataract surgery. In this method, ultrasound waves are used to break the lens. The device used to crush the lens in this method is thick and enters the eye through a cut of about 3 mm. The surgeon then creates a circular incision on the anterior surface of the lens capsule (a very thin membrane that surrounds the lens), a process called capsulorhexis. This process, which is done with an insulin needle, requires great care; Because the thickness of the lens capsule is 16 to 20 microns. Performing this process is the most fateful part of this surgery and requires a very high level of skill, and surgeons must be well trained and evaluated to accomplish it. So, one of the most critical issues in the cataract surgery process is the proper training of novice surgeons for doing the capsulorhexis process well. On the other hand, diagnosing some important ocular features and eye problems, and their effect on the success of cataract surgery and its aftermaths can help us manage this surgery with fewer complications. Today, due to the advancement of artificial intelligence knowledge, it is possible to automate all or part of the surgeons’ surgical training process and surgical skill assessment. We can also automate the diagnosis of ocular features and their effects on the quality of surgery. Such use of artificial intelligence knowledge in medical science will improve the quality of surgeries and reduce the complications of these surgeries for patients. The codified and specific steps for the implementation of this project are considered. We first provide a comprehensive dataset of the capsulorhexis process in cataract surgery, which includes surgery videos and related educational-diagnostic based annotation, with skill-based technical explanations which indicate the level of skill of the surgeon in performing the capsulorhexis process. To perform this step, it is first necessary to record video data related to surgical operations by providing appropriate equipment such as quality cameras and installing them in cataract surgery rooms and proper use of their data on an efficient communication platform. Fortunately, due to the agreement between ARAS and FARABI Hospital, the means to accomplish this step has been provided. After these steps, a proper dataset is formed for joint work between medicine and artificial intelligence. Due to the principled and comprehensive annotations that are available in this dataset, it is a rich source for training the artificial intelligence models, and it can be used for automating the surgical training process and diagnosis of some important ocular features, to reduce surgeries complications and adopt proper strategies for managing the difficulties in capsulorhexis process. Finally, we provide an artificial intelligence structure to automate assessing surgical skills based on video data. The proposed structure can expand surgical training and, by diagnosing important ocular features, assist surgeons in better management of surgical procedures to reduce surgeries complications. According to the principled and codified method adopted, this AI-based automated surgical skill assessment system closely resembles what is happening in real.
Outcomes: Among the previous works in this field, we can mention evaluating the surgeon’s skill according to the video and kinematic data related to the three operations of suturing, knot-Tying, needle-Passing [1, 2]. Similar work has also been done in rehabilitation and sports training, which, based on the formation of a similar dataset and by taking a new video, automatically suggests training tips related to the skill of performing a rehabilitation or sports task [3, 4]. On the other hand, some works investigate the effect of ocular characteristics on the success of the capsulorhexis process for better managing the difficulties of the capsulorhexis process [5, 6]. Our Research Group has done some successful projects in the field of automating the surgical skills assessment process (considering specific tasks and based on kinematic data of surgical instruments). Although many studies have been done in this field, most of them were based on kinematic data; while these data are not available in many surgical environments, and we have to use expensive equipment to reach them. As a result of this study, while preparing a comprehensive dataset for artificial intelligence and medical applications, a suitable platform is provided for the use of video data to automate surgical training and skill assessment process in any environment without worrying about the use of any expensive equipment.
Innovation: This comprehensive product, which includes data related to the capsulorhexis process in cataract surgery and numerous worth annotations based on surgical training and diagnosis of ocular features for better management of surgery training, has no internal or external alternative. Explanation-based annotation of surgical processes is done for the first time in this field to provide the possibility of creating a platform for automation the surgical training close to its reality. This project is significantly helpful in optimizing the training process for the surgical trainers and trainees the possibility of repetition of the training with high accuracy, shortening the bed occupancy time, shortening surgery time for the patient, shortening the period of skills acquisition, and improving patients’ surgical outcomes, reducing training costs and increasing the quality of education, advancing medical research and investigating the causes of unsuccessful surgeries and their problems, and reducing complications during surgery. Also, due to the COVID-19 pandemic, there is more motivation and need to make educations with the use of technology and virtual. Furthermore, the annotations in this database can be used to analyze an ongoing surgery, anticipate potential risks, and make some suggestions in the future.
References:
[1] Hassan Ismail Fawaz and Germain Forestier and Jonathan Weber and Lhassane Idoumghar and Pierre-Alain Muller (2018). Evaluating surgical skills from kinematic data using convolutional neural networks. CoRR, abs/1806.02750.
[2] Isabel Funke and Sören Torge Mees and Jürgen Weitz and Stefanie Speidel (2019). Video-based surgical skill assessment using 3D convolutional neural networks. CoRR, abs/1903.02306.
[3] Yalin Liao and Aleksandar Vakanski and Min Xian (2019). A Deep Learning Framework for Assessing Physical Rehabilitation Exercises. CoRR, abs/1901.10435.
[4] Paritosh Parmar and Brendan Tran Morris (2019). What and How Well You Performed? A Multitask Learning Approach to Action Quality Assessment. CoRR, abs/1904.04346.
[5] Mohammadpour, M., Erfanian, R., & Karimi, N. (2012). Capsulorhexis: Pearls and pitfalls. Saudi journal of ophthalmology : official journal of the Saudi Ophthalmological Society, 26(1), 33–40. https://doi.org/10.1016/j.sjopt.2011.10.007
[6] Abhay Vasavada, & Raminder Singh (2000). Phacoemulsification in eyes with a small pupil. Journal of Cataract and Refractive Surgery, 26(8), 1210–1218.
[7] Yixin Gao, S. Swaroop Vedula, Carol E. Reiley, Narges Ahmidi, Balakrishnan Varadarajan, Henry C. Lin, Lingling Tao, Luca Zappella, Benjam ́ın B ́ejar, David D. Yuh, Chi Chiung Grace Chen, Ren ́e Vidal, Sanjeev Khudanpur and Gregory D. Hager, The JHU-ISI Gesture and Skill Assessment Working Set (JIGSAWS): A Surgical Activity Dataset for Human Motion Modeling, In Modeling and Monitoring of Computer Assisted Interventions (M2CAI) – MICCAI Workshop, 2014.
Project Manager: Parisa Hasani
Development of the Surgical Metrics and Implementation of Skill Assessment Methods in the Eye Surgery Haptic Training System
Feedback and assessment of expert surgeons in basic robotic-assisted minimally invasive surgery (RMIS) training is very time consuming. It is very favorable to automatically feed- back all the surgeons in different skill levels during the training process. Various methods have been proposed to assist the training and evaluation process for novice surgeons. In this project, we focused on this subject and have used the surgical robot kinematic dataset named JIGSAWS, to extract 43 features from its suturing data profile. Furthermore, by extracting critical features of tool movements, it has been attempted to categorize surgeons with high accuracy into three levels, novice, intermediate and expert surgeons. The features were extracted from time-, motion-, entropy-, and frequency-based indices. With the aid of feature selection methods, the features that make the most distinction between surgeons have been identified, and skill assessments have been based on them. To find out the most relevant features in skill assessment, we perform and compare two feature selection/reduction methods, namely principal component analysis (PCA) and relief algorithm. We separately reduce the features based on these two methods, while using a combined method (PCA+relief). Although resulting in an acceptable accuracy in skill level detection of 84% when using each of them separately, the combined method results in 92% particularly noteworthy accuracy. Moreover, after presenting the proposed method and its validation on the JIGSAWS data set, we apply it to the dataset extracted from the ARASH:ASiST, our developed eye surgery training system. This experiments, which was on vitrectomy surgery, are performed by surgeons in three skill levels, a specialist surgeon, a surgical resident, and a person without any medical background. The experiments were performed on human eyes bank at Farabi Hospital. While, ARASH:ASiST recorded the position and speed data, the data set is pre-examined and the outliers data are removed. Then the acceleration and jerk indices are obtained by deriving the velocity and acceleration data, respectively. After collecting the data set and normalizing them, we apply the proposed method and classify the surgeons into three skill levels (novice, intermediate, expert) with an accuracy of 86%, which is remarkable given the real and unstructured environment. Briefly, the main contribution of the thesis is to introduce a skill assessment method and its development based on different feature extraction/selection methods. Additionally, the experimental results on JIGSAWS and ARASH:ASiST data sets are presented to verify the proposed methodology, and to provide a promising skill assessment method for facilitating vitrectomy surgery training.
Project Manager: Hamed Sadeghi
Evaluation of surgical skills in facilitating haptics system of ARAS surgery training using machine learning algorithms
Surgery training is very delicate and of utmost importance for a novice, surgeon to become an expert. Surgery experience can significantly help novice surgeons in her/his surgery skills, However, with the cost of operating on real patients. Therefore surgery simulation may come as a rescue and by collecting surgeons’ operation data during surgery it is possible to enhance the training process and make it more efficient if collected data could be efficiently processed and means for improvements could be provided. In this project, different machine learning methods have been examined in surgical fields. For this means, ARASH:ASiST the ARAS haptic system for eye surgery training is used to extract data from surgeries and the surgery training procedure. Furthermore, the model for this system is used to test and implement the proposed machine learning methods. For the proof of concept, the JIGSAWS dataset and the JHU-ISI Gesture and Skill Assessment Working data Set is used, which is a surgical activity dataset for human motion modeling. JIGSAWS was captured using the da Vinci Surgical System from eight surgeons with different levels of skill performing five repetitions of three elementary surgical tasks on a bench-top model: suturing, knot-tying, and needle-passing, which are standard components of most surgical skills training curricula. The kinematics data of this dataset is used to train our machine learning models. First, every single surgery data is considered as a time series and recurrent neural networks (RNN), especially LSTM (long-short term memory) networks are trained on them. In another method, all our surgery kinematics data are converted to image data type and by use of convolutional neural networks (CNN) to classify our data and train our model. By Using expert surgeon’s data our machine learning model is trained to learn the best surgery pattern and use that pattern to evaluate any new data, extracted from novice surgeons. By this means, it is possible to use these methods to evaluate surgeons’ skills both online and offline also enables us to help them during surgery. In the final stage of this research, a haptic system simulator is used to train a reinforcement learning agent. By Using unity software, ARASH:ASiST model is developed into a labscale simulator to extract exhaustive data, and furthermore, to experience more surgery scenarios in the simulator to train our reinforcement learning agent, and implement our machine learning methods more freely on the simulator platform. It is possible to have a model to evaluate CNN or LSTM methods but different situations in surgery may cause problems in the assessment criteria, therefore in this stage of the research reinforcement learning is used as a complementary amendment. In this method, the simulator is used to experience almost all situations that may happen in surgery as our agent’s episodes and during these episodes, our reinforcement learning agent can learn different expert surgeon’s reactions in different situations. By this means, before any assessment, our reinforcement learning agent can make an optimal pattern for that surgery, and then that surgery pattern is used to evaluate novice or intermediate surgeons through previously developed methods.
Project Manager: Ali Hassani
Dynamic Modeling and Calibration of ARASH:ASiST: ARAS Haptic System for Eye Surgery Training
One of the leading causes of blindness is retinal diseases, and vitro-retinal surgeries are commonly used for treatment. Vitrectomy surgery, which is considered in this thesis, is defined as removing and replacing vitreous humor. Vitrectomy surgery includes microsurgical procedures and is considered to be one of the most challenging operations in medical science. To address these problems, the use of robotic technology is recommended. With the increasing development of microsurgical robots for vitreoretinal eye surgeries, the training process for novice surgeons can also be evaluated. Considering the presented idea in eye surgical training, the main focus of this thesis is ARASH:ASiST. ARASH:ASiST stands for ”ARAS haptic system for eye surgery training”, which is an eye surgery training system developed to train novice surgeons in vitrectomy surgeries. ARASH:ASiST consists of two identical robotic consoles, one for the trainer and the other for the novice surgeon. ARASH:ASiST mechanical mechanism is a three DOF haptic device that was developed for use in a dual haptic eye surgery training system, and provides over 90○ rotation in both rotational directions and it provides 43.6mm translational motion in the insertion direction. Considering its parallelogram-based mechanism and back-drivable capstan transmission, this device provides the main minimally vitrectomy surgery, such as the remote center of motion, and a favorable workspace. The aim of this research is to increase the performance of ARASH:ASiST through dynamic modeling, dynamic parameter identification, and model-based controller design and implementation. To accomplish this goal, the dynamic formulations of a general manipulator are studied in-depth and various dynamic forms, including explicit dynamics, linear regressor, and Slotine-Li regressor form, are derived. Since the derived formulations are general formulations, the results on ARASH:ASiST are also examined and the various forms of dynamics are also extracted. To verify the reported result, a prototype of ARASH:ASiST is modeled in MSC-ADAMS®, and the results of the dynamic formulation are validated. In addition, an inverse dynamic controller (IDC), is implemented on the robot to evaluate the precision of motion tracking of one of the consoles. The results show a suitable tracking error of about 200 µm for surgical instrument. Finally, the dynamic parameter calibration results of ARASH:ASiST are investigated. For this purpose, a linear regression model for the dynamic behavior of the robot in presence of friction forces and other effective terms is derived, while the dynamic parameters of the robot are calibrated using linear least square (LS) scheme. Cross–validation results for different trajectories indicate that the identified model provides suitable performance. It is shown that the calibrated model developed in this chapter is very suitable for different model-based controller designs. Implementation of a robust controller results in doubling the tracking performance to some earlier controller structures implemented on the system.
Featured Products
Robot-assisted eye surgery with a master-slave teleoperation system – Teleoperation Systems in Robot-assisted Eye Surgery
Robot-assisted eye surgery with a master-slave teleoperation system is investigated in this research. The actual surgery is performed by the slave robot utilizing the commends applied by the surgeon on the master robot. Robotic-assisted surgery has the following advantages over the manual surgery
-
- Filtering Tremor
- Scaling of Position and Force
- Enhanced sensitivity through haptic feedback
- providing the surgeon an ergonomic body posture
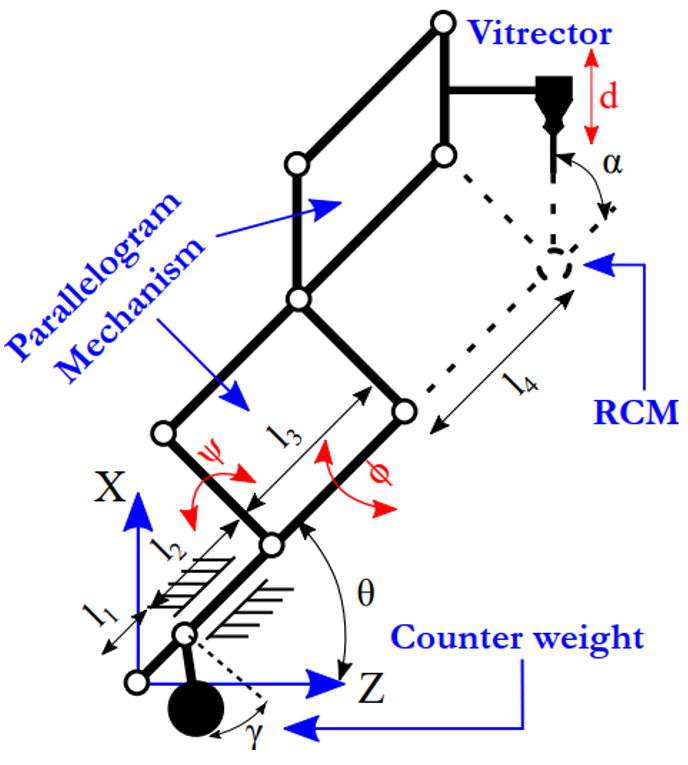
Since the slave robot is designed to perform Minimally Invasive Surgeries, the Remote Center of Motion (RCM) is provided by the mechanical solutions. Most of the eye surgery robotic systems such as preceyes, Steady-Hand, etc have utilized parallelogram mechanism to provide RCM. However, a different methodology based on the spherical mechanism is followed in this research to provide RCM. The capstan drive mechanism is utilized to provide a back-drivable transmission mechanism with high accuracy and zero backlashes.
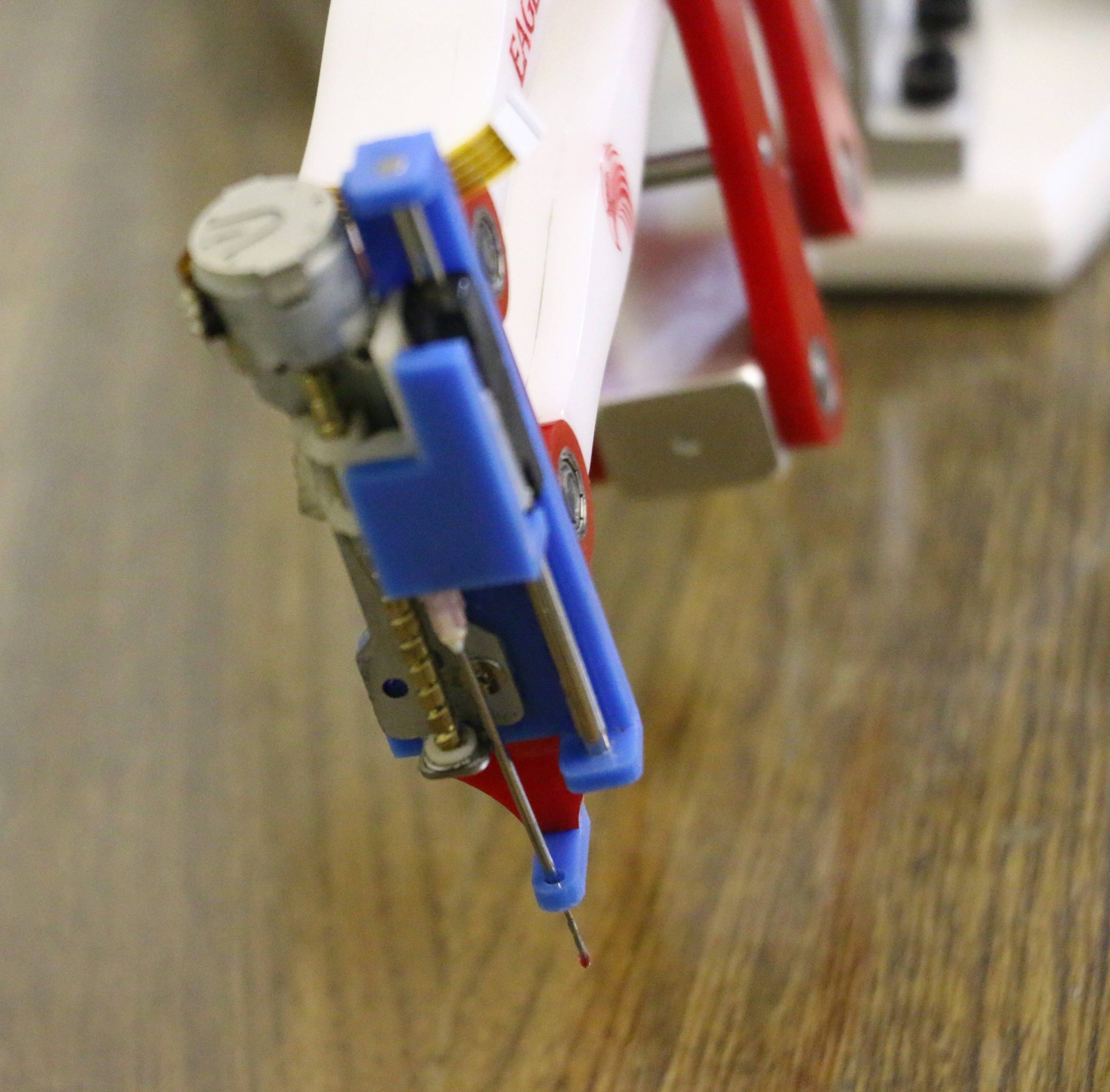
Eagle Eye, a precise eye surgery mechanism
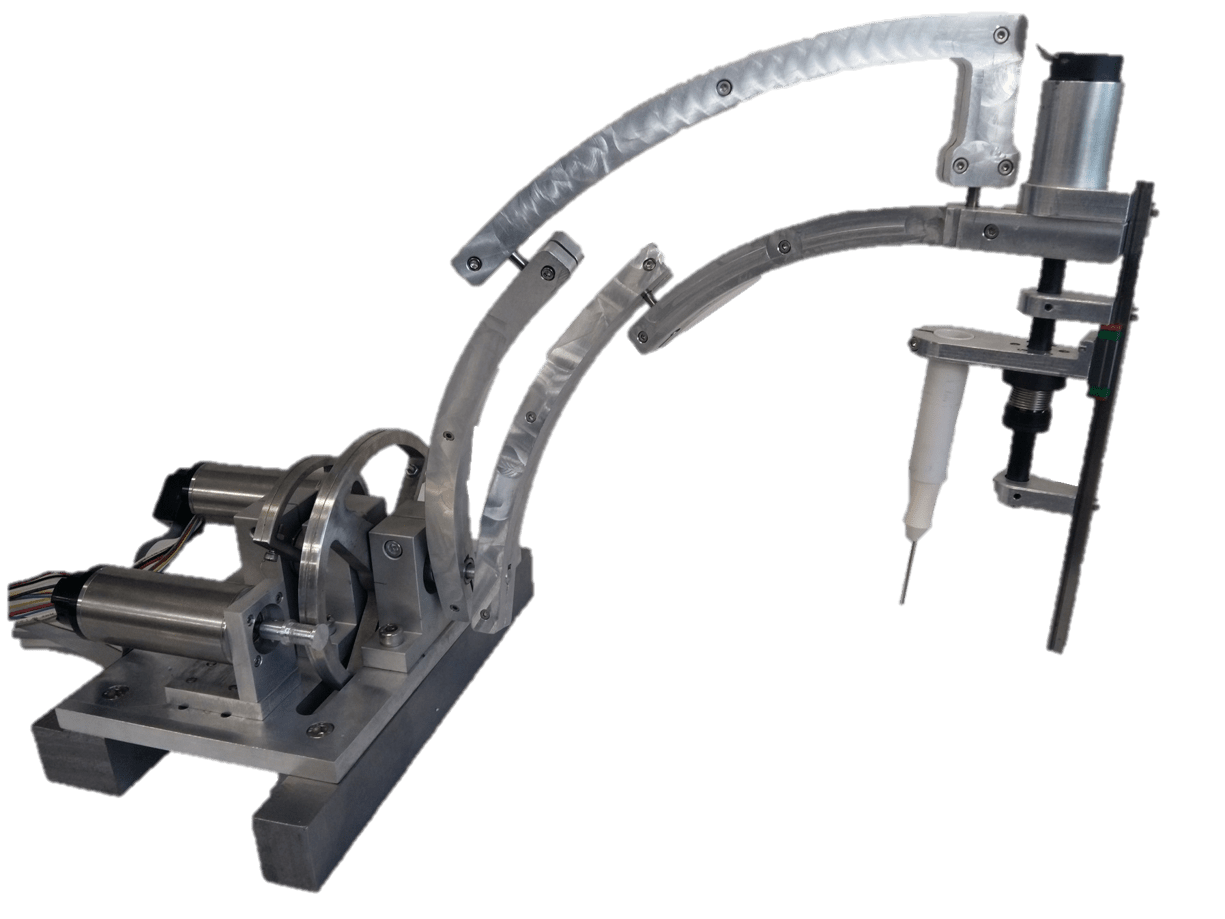
Eagle Eye is a novel parallelogram mechanism to provide mechanical Remote Center of Motion (RCM) for robotic-assisted vitreoretinal eye surgery. In the conventional parallelogram mechanism, the two rotational degrees of freedom are provided by a combination of serial and parallel structures. However, in the Eagle Eye robot, the rotational degrees of freedom are provided by a fully parallel mechanism, resulting in higher stiffness and improved position accuracy. An innovative design of a parallel robot is to produce smooth and precise motions in spherical space that has been considered. With the aim of the Eagle Eye robot, this kind of eye surgery can be done in a safe environment. Furthermore, a collaboration of surgeon and surgeon trainee with using their own haptic device in a networked workspace is feasible. This robot is a part of teleoperation eye surgery robotic project which was done at ARAS Lab under the supervision of professor Taghirad.
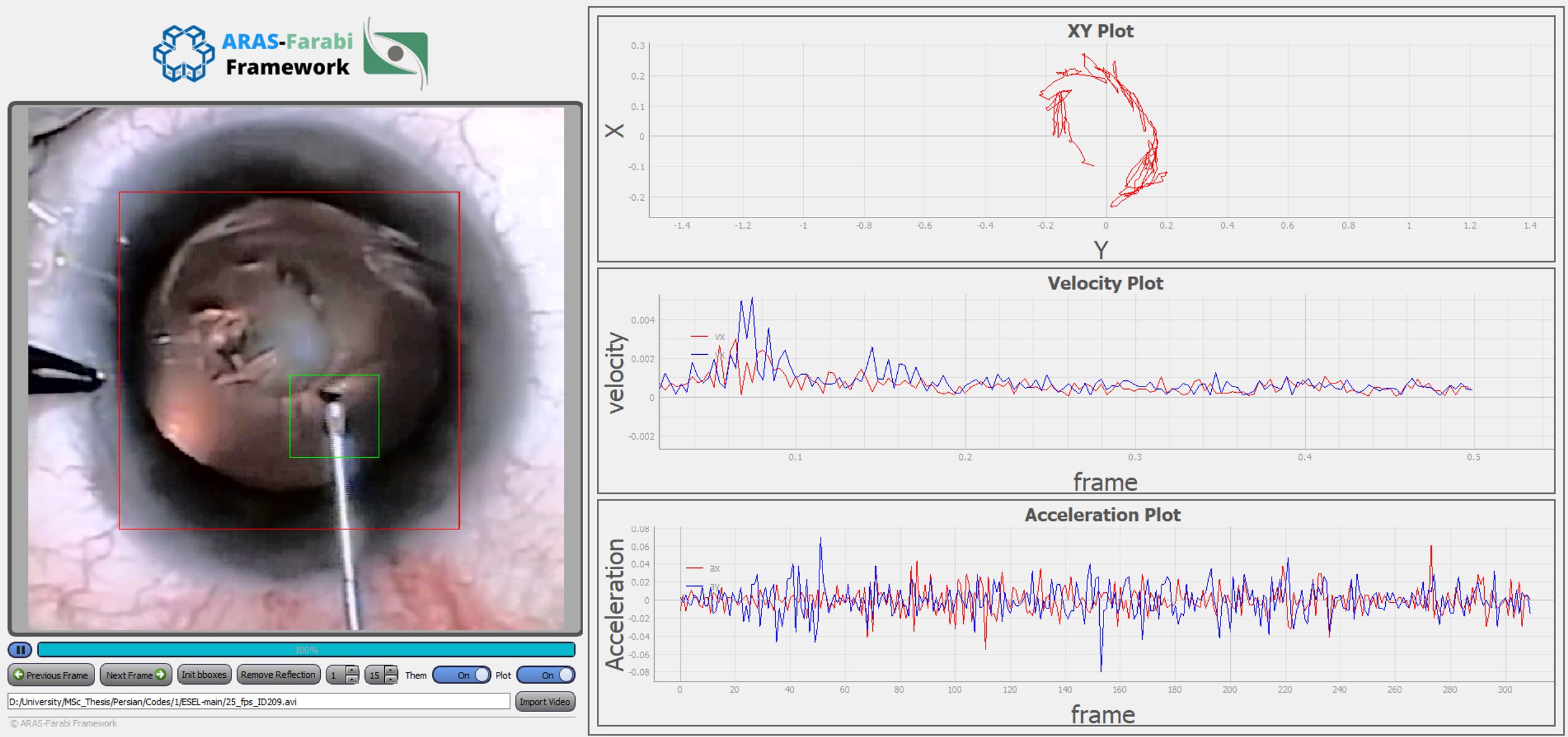
Eye Surgery Environment Real-Time Analyzer (ESERA) – ARAS-Farabi Surgical Analysis Software
This software is a tool for extracting motion information and surgical statistical patterns to analyze and evaluate surgical videos that Advanced Robotics and Automated System (ARAS) Research Group has developed in collaboration with Farabi Ophthalmology Hospital.
Our Team
Seyed Mahdi Tavakoli Afshari received his BSc and MSc degrees in Electrical Engineering from Ferdowsi University and K.N. Toosi University, Iran, in 1996 and 1999, respectively. He then received his PhD degree in Electrical and Computer Engineering from the University of Western Ontario, London, ON, Canada, in 2005. In 2006, he was a post-doctoral research associate at Canadian Surgical Technologies and Advanced Robotics (CSTAR), London, ON, Canada. In 2007-2008, and prior to joining the Department of Electrical and Computer Engineering at the University of Alberta, Dr. Tavakoli was an NSERC Post-Doctoral Fellow with the BioRobotics Laboratory of the School of Engineering and Applied Sciences at Harvard University, Cambridge, MA, USA. Dr. Tavakoli’s research research focuses on haptics and teleoperation control, medical robotics, surgical robotics and image-guided surgery.
Seyed Farzad Mohammadi received the Fellowship degree in anterior segment of the eye from the Tehran University of Medical Sciences, Tehran, Iran, in 2007. He is currently an Associate Professor of ophthalmology with Translational Ophthalmology Research Center, Farabi Eye Hospital, Tehran University of Medical Sciences. His current research interests include bench-to-bedside researches and ophthalmic epidemiology. He is board-certified in ophthalmology and a fellow of the International Council of Ophthalmology, and he is currently involved in Ophthalmic Epidemiology & Public Health Ophthalmology initiatives; Anterior Segment, Cornea & Refractive Surgery clinical research; Anterior Segment Regenerative Ophthalmology (Corneal Endothelial Cell Therapy); Robotics in Ophthalmic Surgery Education; Natural Lens Biomechanics; & Corneal Imaging (non-optical).
Keyvan Hashtrudi-Zaad received the Ph.D. degree in electrical and computer engineering from the University of British Columbia, Vancouver, BC, Canada, in 2000. He then held a consulting position with Motion Metrics International Corporation, Vancouver, where he was involved in the development of a dynamic payload monitoring system for heavy duty hydraulic machines. In 2001, he joined the Department of Electrical and Computer Engineering, Queens University, Kingston, ON, Canada, where he is currently a Professor and the Co-Director of the BioRobotics Research Laboratory. His current research interests include telerobotics, haptics, telerehabilitation, autonomous driving, and control systems. Dr. Hashtrudi-Zaad served as an Associate Editor for the IEEE TRANSACTIONS ON HAPTICS and on the organization committees of a number of IEEE-sponsored conferences.
Dr. Alireza Lashay obtained his PhD in vetreo retinal surgery from Tehran University of Medical Sciences,iran in the year 1993. He holds a Master Degree (MSc) in Opthalmology from Tehran University of Medical Sciences, Iran in the year 1988, followed by a Bachelor’s Degree in general medicine from Tehran University of Medical Sciences,Iran in the year 1981. He is now working as a Professor in Opthalmology in Tehran University of Medical Sciences.
Dr. Ghasem Fakhraei has awarded his Fellow in Glaucoma, Wills Eye Institute, Thomas Jefferson University, Philadelphia, USA, in January 2009, and Fellow in Glaucoma, Farabi Eye Hospital, Tehran University of Medical Sciences, Tehran, Iran, January 2008. He is now working as an accociate Professor in opthalmology, Glaucoma Service, in tehran university of medical sciences.

Dr. Hamid Riazi currently works at Farabi eye hospital as a assistant professor of ophthalmology. Hamid does research in Ophthalmology. Their most recent publication is ‘Successful treatment of tubercular multifocal serpiginous-like choroiditis without use of anti-inflammatory drugs: A case report with multimodal imaging’.

Dr. Parisa Abdi currently works at Farabi hospital as a assistant Professor of Cornea and External Eye Diseases Department of Ophthalmology, School of Medicine.

Dr. Mohammad Motaharifar received the B.Sc. degree in electrical engineering from the Iran University of Science and Technology, Tehran, Iran, in 2009, and the M.Sc. degree in electrical engineering from the Amirkabir University of Technology, Tehran, in 2011. He was a Research Assistant at Real time Systems Laboratory, Electrical Engineering Department, Amirkabir University of Technology from 2011 to 2014. He is currently working toward the Ph.D. degree from the K. N. Toosi University of Technology, Tehran. His research interests include robotics, medical robotics, adaptive control of nonlinear systems, and robust control.

Reza received his B.Sc. degree in Electrical Engineering from Isfahan University of Technology (IUT) in September 2017. He is currently pursuing his M.Sc. degree in Control Engineering at K.N. Toosi University of Technology, Tehran, Iran. Reza has joined Surgical Robotics group in Advanced Robotics and Automated System (ARAS) Lab. His main research interests are Medical Robotics, including applications in surgical training; Haptics and Teleoperation. He is currently working on design and implementation of impedance control of dual haptic for eye surgery training system.

Mohammad Javad Ahmadi was born in Dec. 1996 in Sari in northern IRAN near the beautiful Caspian Sea. In 2011 he was accepted into the NODET (National Organization for Developement of Exceptional Talent) and spent four years in Shahid Beheshti high school and graduated with Diploma GPA of 4/4. In 2015 he entered Amirkabir University of Technology (Polytechnic of Tehran), Tehran, Iran and received his B.Sc. degree in Electrical and Control Engineering with a GPA of 4/4. Currently, He is a graduate student in Control Engineering at K. N. Toosi University of Technology, Tehran, Iran and he has joined the surgical robotics group in Advanced Robotics and Automated System (ARAS) Lab under the supervision of Prof. Hamid D. Taghirad. His main research interest includes medical robots, surgical robots, mobile robots, flying robots, etc. He is also interested in doing research in Control theory, Artificial intelligence & Neural network, IIoT & IoT, and Multi-agent system & Consensus algorithm.

Ashkan Rashvand was born in 26 June 1997 in Qazvin. He graduated from Shahid Babaii NODET (National Organization for Developement of Exceptional Talent) high school. He finished his B.Sc. in controls engineering at Imam Khomeini International University in 2019 with 3.78/4 total GPA. He has always believed that the most important factors to a person’s success in a specific field are their motivation and interest in that field. Believing this idea helped him to be ranked one of the top student during his bachelor position. He started his M. Sc. program in the same major at K.N Toosi University of Technology under supervision of Prof. Taghirad . Now he is a member of ARAS group. His main research interests is robotics (Robots motion planning ,Robots-Assisted Therapy) and Artificial Life.

Mohammad Mahdi Nazeri Ardakani (M.Sc.)
Mohammad Mahdi Nazeri Ardakani was born in Yazd, Iran , in 1997. He graduated from Rahimifar NODET high school, Yazd, Iran, in 2016. He received his bachelor’s degree in electrical engineering, control systems from K. N. Toosi University of Technology, Tehran, Iran, under the supervision of Prof. Hamid D. Taghirad. He is currently pursuing his M.Sc. degree in Control Engineering at K. N. Toosi University of Technology, Tehran, Iran, under the supervision of Prof. Hamid D. Taghirad. He is also a member of surgical robotic team in Advanced Robotics & Automated Systems (ARAS). His main research interests are Robotics and Tele-Robotics, Teleoperation Control, Control theory, Haptics, and Surgical Robots.

Sanam Taali-Pasand was born in Rasht, Iran, in 1993. She received her B.Sc. and M.Sc. degrees both in electrical engineering, control systems from University of Tabriz, Tabriz, Iran, in 2015 and Shahid Beheshti University (SBU), Tehran, Iran, in 2019 respectively. She is currently perusing her second M.Sc. degree in mechatronic engineering at K. N. Toosi University of Technology under the supervision of Prof. Hamid D. Taghirad. She is also a member of surgical robotic team in Advanced Robotics & Automated Systems (ARAS). Her main research interests are Robotics and Tele-Robotics, Teleoperation Control, Haptics and Surgical Robots.

Ali Hassani was born in Tehran, Iran in 1996. He received his B.Sc degree in Mechanical Engineering from Shahid Chamran University (Jundi Shapur), Ahvaz, Iran in 2018. He is currently a M.Sc student in Mechatronics Engineering at K.N. Toosi University, Tehran, Iran. He joined ARAS group under supervision of Dr. Hamid D. Taghirad since October 2018. His current research interests includes various aspects of Dynamics and Control of Parallel Robots.

Parisa Hasani received the B.Sc. degree in electrical engineering from Shariaty Technical College, Tehran, Iran, in 2018. She is currently pursuing the M.Sc. degree in control engineering from the K. N. Toosi University of Technology, Tehran, Iran. She joined the ARAS laboratory and Surgical Robotics group in October 2018. Her research interests include haptics, medical robotics, master-slave teleoperation, and evaluation in robotic-assisted systems for minimally invasive surgery.

Hamed Sadeghi was born in Tehran, Iran in 1996. Hamed finished his B. Sc. in Control engineering at K.N Toosi University of Technology – Tehran in 2018 and started his M. Sc. program in the same major at K.N Toosi University of Technology – Tehran since September 2018 and he joined ARAS group since 2015. His thesis was on focused on Surgical Robotics, mainly design and implement the Electronic hardware of ARASH-ASiST: ARAS Haptic System for EYE Surgery Training and currently He is working as a researcher in the surgical robotics group.

I received my B.Sc. degree in electrical engineering from the Shariaty Technical College, Tehran, Iran. I am currently working toward the M.Sc. degree at the K. N. Toosi University of Technology, Tehran, Iran since October 2017. I joined Surgical Robotics team because of the interesting work done here such as implementation of a Haptic system for eye surgery training. I am working on novice skill assessment methods through this Haptic system.
- Sara Abkhofte, Pedram Agand, Mohammad Savadzadeh, Rashid Mokhtari, Bita Fallahi, Omid Gerami, Maryam Salimifar, Samim Khosravi, Soheil Gholami, Zahra Marvi, Kamran Taran, Maryam Moafi Madani, Bahareh Sabouri, Ali Alipour, Farbid Farshidian.
Publications
| Title | Abstract | Year | Type | Research Group | |
|---|---|---|---|---|---|
| Integrating Impedance Control and Nonlinear Disturbance Observer for Robot-Assisted Arthroscope Control in Elbow Arthroscopic Surgery Teng Li, Armin Badre, Hamid D Taghirad, Mahdi Tavakoli International Conference on Intelligent Robots and Systems (IROS) | Abstract: Robot-assisted arthroscopic surgery is transforming the tradition in orthopaedic surgery. Compliance and stability are essential features that a surgical robot must have for safe physical human-robot interaction ( P HRI). Surgical tools attached at the robot end-effector and human-robot interaction will affect the robot dynamics inevitably. This could undermine the utility and stability of the robotic system if the varying robot dynamics are not identified and updated in the robot control law. In this paper, an integrated frame-work for robot impedance control and nonlinear disturbance observer (NDOB)-based compensation of uncertain dynamics is proposed, where the former ensures compliant robot behavior and the latter compensates for dynamic uncertainties when necessary. The combination of impedance controller and NDOB is analyzed theoretically in three scenarios. A complete simulation and experimental studies … | 2022 | Conference | Surgical Robotics |
|
| An Observer-Based Responsive Variable Impedance Control for Dual-User Haptic Training System A Rashvand, R Heidari, M Motaharifar, A Hassani, MR Dindarloo, MJ Ahmadi, K Hashtrudi-Zaad, M Tavakoli, HD Taghirad 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) | Abstract: This paper proposes a variable impedance control architecture to facilitate eye surgery training in a dual-user haptic system. In this system, an expert surgeon (the trainer) and a novice surgeon (the trainee) collaborate on a surgical procedure using their own haptic devices. The mechanical impedance parameters of the trainer's haptic device remain constant during the operation, whereas those of the trainee vary with his/her proficiency level. The trainee's relative proficiency might be objectively quantified in real-time based on position error between the trainer and the trainee. The proposed architecture enables the trainer to intervene in the training process as needed to ensure the trainee is following the right course of action and to avoid the trainee's from potential tissue injuries. The stability of the overall nonlinear closed-loop system has been investigated using the input-to-state stability (ISS) criterion. High-gain … | 2022 | Conference | Surgical Robotics | |
| On The Dynamic Calibration and Trajectory Control of ARASH: ASiST A Hassani, MR Dindarloo, R Khorrambakht, A Bataleblu, R Heidari, M Motaharifar, SF Mohammadi, HD Taghirad 2022 8th International Conference on Control, Instrumentation and Automation (ICCIA) | Abstract: This article investigates the dynamic parameter calibration of ARAS Haptic System for EYE Surgery Training (ARASH:ASiST). ARASH:ASiST is a 3-DOF haptic device developed for intraocular surgery training. In this paper, the linear regression form of the dynamic formulation of the system with respect to its dynamic parameters is derived. Then the dynamic parameters of ARASH:ASiST are calibrated using the least square (LS) identification scheme. The cross-validation results for different trajectories indicate that the identified model has a suitable approximate fitness percentage in both translational and rotational motions of the surgical instrument. Finally, a robust model-based controller is implemented on the real prototype by the use of the calibration outcome, and it is verified that by using the estimated dynamic model, the trajectory tracking performance is significantly improved and the tracking error is reduced … | 2022 | Conference | Surgical Robotics | |
| Adaptive robust impedance control of haptic systems for skill transfer Ashkan Rashvand, Mohammad Javad Ahmadi, Mohammad Motaharifar, Mahdi Tavakoli, Hamid D Taghirad 2021 9th RSI International Conference on Robotics and Mechatronics (ICRoM) | Abstract: This paper aims to develop the impedance control structure of a dual-user haptic training system for the application of surgical training. Through the proposed structure, the process of skill transfer from the trainer to the trainee is considered through automatic transformation of impedance coefficients, based on the evaluation of the trainee’s performance and its adaptation to the trainer’s behavior. The similarities between the position of the trainer and the trainee are examined in a time window to generate the base structure for varying impedance coefficients. In presence of modeling uncertainties, the proposed impedance controller is capable to enforce two reference impedance dynamics for the trainer and the trainee. In the proposed control structure, a high-gain observer is used to satisfy force demands without requiring expensive sensors. The input-to-state stability (ISS) of the dual-user haptic training system is … | 2021 | Conference | Surgical Robotics | |
| Robust -based control of ARAS-diamond: A vitrectomy eye surgery robot Abbas Bataleblu, Rohollah Khorrambakht, Hamid D Taghirad Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science | Abstract: In this paper, we investigate the challenges of controlling the ARAS-Diamond robot for robotic-assisted eye surgery. To eliminate the system’s inherent uncertainty effects on its performance, a cascade architecture control structure is proposed in this paper. For the inner loop of this structure, two different robust controls, namely, and μ-synthesis, with stability and performance analysis, are synthesized. The outer loop of the structure, on the other hand, controls the orientation of the surgical instrument using a well-tuned PD controller. The stability of the system as a whole, considering both inner and outer loop controllers, is analyzed in detail. Furthermore, implementation results on the real robot are presented to illustrate the effectiveness of the proposed control structure compared to that of conventional controller designs in the presence of inherent uncertainties of the system and external disturbances, and it is … | 2021 | Journal | Surgical Robotics | |
| Applications of Haptic Technology, Virtual Reality, and Artificial Intelligence in Medical Training During the COVID-19 Pandemic Mohammad Motaharifar, Alireza Norouzzadeh, Parisa Abdi, Arash Iranfar, Faraz Lotfi, Behzad Moshiri, Alireza Lashay, Seyed Farzad Mohammadi, Hamid D Taghirad Frontiers in Robotics and AI, 258 | Abstract: This paper examines how haptic technology, virtual reality, and artificial intelligence reduce the physical contact in medical training during the COVID-19 Pandemic. Notably, any mistake made by the trainees during the education stages might lead to undesired complications for the patient. Therefore, training of the medical skills to the trainees have always been a challenging issue for the expert surgeons, and this is even more challenging in pandemics. The current method of surgery training needs the novice surgeons to attend some courses, watch some procedure, and conduct their initial operations under the direct supervision of an expert surgeon. Owing to the requirement of physical contact in this method of medical training, the involved people including the novice and expert surgeons confront a potential risk of infection to the virus. This survey paper reviews novel recent breakthroughs along with new areas in which assistive technologies might provide a viable solution to reduce the physical contact in the medical institutes during the COVID-19 pandemic and similar crises. | 2021 | Journal | Surgical Robotics | |
| Kinematic and Dynamic Analysis of ARASH ASiST: Toward Micro Positioning A Hassani, MR Dindarloo, R Khorambakht, A Bataleblu, H Sadeghi, R Heidari, A Iranfar, P Hasani, NS Hojati, A Khorasani, N KhajeAhmadi, M Motaharifar, H Riazi-Esfahani, A Lashay, SF Mohammadi, HD Taghirad 2021 9th RSI International Conference on Robotics and Mechatronics (ICRoM) | Abstract: This article elaborate on the kinematic and dynamic analysis of ARASH:ASiST, "ARAS Haptic System for Eye Surgery Training", which is developed for vitrectomy eye surgery training. The mechanism selection of this system is reviewed first, in order to assist such a precise intraocular eye surgery training. Then the kinematics and dynamics analysis of the proposed haptic system is investigated. To verify the reported result, a prototype of ARASH:ASiST is modeled in MSC-ADAMS ® , and the results of the dynamic formulation are validated. Finally, a common model-based controller is implemented on the real prototype, and it is verified that with such controller a suitable accuracy of 200 μm is attainable for the surgical instrument. | 2021 | Conference | Surgical Robotics | |
| Adaptive Robust Impedance Control of Haptic Systems for Skill Transfer Ashkan Rashvand, Mohammad Javad Ahmadi, Mohammad Motaharifar, Mahdi Tavakoli, Hamid D Taghirad 2021 9th RSI International Conference on Robotics and Mechatronics (ICRoM) | Abstract: Designing control systems with bounded input is a practical consideration since realizable physical systems are limited by the saturation of actuators. The actuators' saturation degrades the performance of the control system, and in extreme cases, the stability of the closed-loop system may be lost. However, actuator saturation is typically neglected in the design of control systems, with compensation being made in the form of over-designing the actuator or by post-analyzing the resulting system to ensure acceptable performance.. | 2021 | Conference | Surgical Robotics | |
| A Review on Applications of Haptic Systems, Virtual Reality, and Artificial Intelligence in Medical Training in COVID-19 Pandemic R Heidari, M Motaharifar, H Taghirad, SF Mohammadi, A Lashay Journal of Control | Abstract: This paper presents a survey on haptic technology, virtual reality, and artificial intelligence applications in medical training during the COVID-19 pandemic. Over the last few decades, there has been a great deal of interest in using new technologies to establish capable approaches for medical training purposes. These methods are intended to minimize surgerychr('39')s adverse effects, mostly when done by an inexperienced surgeon | 2021 | Journal | Surgical Robotics | |
Closed-form Inverse kinematics Equations of a Robotic Finger Mechanism Mohammad Sina Allahkaram, Mohammad Javad Ahmadi, Hamid D Taghirad 2021 9th RSI International Conference on Robotics and Mechatronics (ICRoM) | Abstract: Deriving the explicit form of direct and inverse kinematics equations is challenging in kinematics analysis of serial manipulators. In explicit forms the exact solutions of the inverse problem may be obtained with the required accuracy. Furthermore, in the controller topologies where inverse kinematics is needed, it is much preferable to have the explicit form, because of its easier real time implementation. The biomimic robotic hands has a complex structures, consisting of a number of cooperating serial kinematic chain. In this paper, a method for obtaining the explicit form of the inverse kinematics equations of a major group of robotic finger structures is proposed by using spatial analysis. By this means, the inverse kinematic of this class of mechanisms is derived in explicit form. To investigate the effectiveness of the proposed method an open-source model of such mechanisms named InMoov is used, and the accuracy … | 2021 | Conference | Surgical Robotics | |
| Dynamic modeling and identification of aras-diamond: A vitreoretinal eye surgery robot Ali Hassani, Abbas Bataleblu, Seyed Ahmad Khalilpour, Hamid D Taghirad Modares Mechanical Engineering 21 (11), 783-795 | Abstract: Original Research Deriving the accurate dynamic model of robots is pivotal for robot design, control, calibration, and fault detection. To derive an accurate dynamic model of robots, all the terms affecting the robot's dynamics are necessary to be considered, and the dynamic parameters of the robot must be identified with appropriate physical insight. In this paper, first, the kinematics of the ARAS-Diamond spherical parallel robot, which has been developed for vitreoretinal ophthalmic surgery, are investigated, then by presenting a formulation based on the principle of virtual work, a linear form of robot dynamics is derived, and the obtained results are validated in SimMechanics environment. Furthermore, other terms affecting the robot dynamics are modeled, and by using the linear regression form of the robot dynamics with the required physical bounds on the parameters, the identification process is accomplished adopting the least-squares method with appropriate physical consistency. Finally, by using the criteria of the normalized root mean squared error (NRMSE) and using different trajectories, the accuracy of the identified dynamic parameters is evaluated. The experimental validation results demonstrate a good fitness for the actuator torques (about 75 percent), and a positive mass matrix in the entire workspace, which allows us to design the common model-based controllers such as the computer torque method, for precise control of the robot in vitreoretinal ophthalmic surgery. | 2021 | Journal | Surgical Robotics | |
| A force reflection robust control scheme with online authority adjustment for dual user haptic system Mohammad Motaharifar, Hamid D. Taghirad Mechanical Systems and Signal Processing | Abstract: This article aims at developing a control structure with online authority adjustment for a | 2020 | Journal | Surgical Robotics | |
| A Robust Controller with Online Authority Transformation for Dual User Haptic Training System M Motaharifar, H Taghirad, SF Mohammadi Journal of Control | Abstract: The design problem for the control a dual-user haptic surgical training system is studied in this article. The system allows the trainee to perform the task on a virtual environment, while the trainer is able to interfere in the operation and correct probable mistakes made by the trainee. The proposed methodology allows the trainer to transfer the task authority to or from the trainee in real time | 2020 | Journal | Surgical Robotics | |
| Control Synthesis and ISS Stability Analysis of Dual-User Haptic Training System Based on S-Shaped Function Mohammad Motaharifar, Hamid D. Taghirad, Keyvan Hashtrudi-Zaad, Seyed Farzad Mohammadi IEEE/ASME Transactions on Mechatronics | Abstract: The controller design and stability analysis of dual user training haptic system is studied. Most of the previously proposed control methodologies for this system have not simultaneously considered special requirements of surgery training and stability analysis of the nonlinear closed loop system which is the objective of this paper. In the proposed training approach, the trainee is allowed to freely experience the task and be corrected as needed, while the trainer maintains the task dominance. A special S-shaped function is suggested to generate the corrective force according to the magnitude of motion error between the trainer and the trainee. The closed loop stability of the system is analyzed considering the nonlinearity of the system components using the Input-to-State Stability (ISS) approach. Simulation and experimental results show the effectiveness of the proposed approach. | 2019 | Conference | Surgical Robotics | |
| Control Synthesis and ISS Stability A5Analysis of Dual-User Haptic Training System Based on S-Shaped Function Mohammad Motaharifar, Hamid D. Taghirad, Keyvan Hashtrudi-Zaad and Seyed Farzad Mohammadi IEEE/ASME Transactions on Mechatronics | Abstract: The controller design and stability analysis of dual user training haptic system is studied. Most of the previously proposed control methodologies for this system have not simultaneously considered special requirements of surgery training and stability analysis of the nonlinear closed loop system which is the objective of this paper. In the proposed training approach, the trainee is allowed to freely experience the task and be corrected as needed, while the trainer maintains the task dominance. A special S-shaped function is suggested to generate the corrective force according to the magnitude of motion error between the trainer and the trainee. The closed loop stability of the system is analyzed considering the nonlinearity of the system components using the Input-to-State Stability (ISS) approach. Simulation and experimental results show the effectiveness of the proposed approach. | 2019 | Journal | Surgical Robotics | |
| Control Synthesis and ISS Stability Analysis of a Dual-User Haptic Training System Based on S-Shaped Function Mohammad Motaharifar, Hamid D. Taghirad, Keyvan Hashtrudi-Zaad, and Seyed Farzad Mohammadi IEEE/ASME Transactions on Mechatronics | Abstract: The controller design and stability analysis of | 2019 | Journal | Surgical Robotics | |
| Control of Dual-User Haptic Training System With Online Authority Adjustment: An Observer-Based Adaptive Robust Scheme Mohammad Motaharifar, Hamid D. Taghirad, Keyvan Hashtrudi-Zaad and Seyed Farzad Mohammadi IEEE Transactions on Control Systems Technology | Abstract: The design problem for the control a dual-user | 2019 | Journal | Surgical Robotics | |
| A Force Reflection Impedance Control Scheme for Dual User Haptic Training System M. Motaharifar, A. Iranfar, and H. D. Taghirad 2019 27th Iranian Conference on Electrical Engineering (ICEE) | Abstract: In this paper, an impedance control based training scheme for a dual user haptic surgery training system is introduced. The training scheme allows the novice surgeon (trainee) to perform a surgery operation while an expert surgeon (trainer) supervises the procedure. Through the proposed impedance control structure, the trainer receives trainee’s position to detect his (her) wrong movements. Besides, a novel force reflection term is proposed in order to efficiently utilize trainer’s skill in the training loop. Indeed, the trainer can interfere into the procedure whenever needed either to guide the trainee or suppress his (her) authority due to his (her) supposedly lack of skill to continue the operation. Each haptic device is stabilized and the closed loop stability of the nonlinear system is investigated. Simulation results show the appropriate performance of the proposed control scheme. | 2019 | Conference | Surgical Robotics | |
| Robust Impedance Control for Dual User Haptic Training System R. Heidari, M. Motaharifar and H. D. Taghirad International Conference on Robotics and Mechatronics | In this paper, an impedance controller with switching parameters for a dual-user haptic training system is introduced. The trainer and the trainee are connected through their haptic consoles, and the trainee performs the surgical procedure on the environment. The trainer can intervene in the procedure by pressing a mechanical pedal; thus, the control parameters are switched to transfer the authority over the task from the trainee to the trainer. The stability of each subsystem and the closed-loop stability of the overall system are investigated. The simulation results verify the performance of the proposed controller. | 2019 | Conference | Surgical Robotics | |
| A Dual-User Teleoperated Surgery Training Scheme Based on Virtual Fixture A. Iranfar, M. Motaharifar, and H. D. Taghirad 2018 6th RSI International Conference on Robotics and Mechatronics (IcRoM) | Abstract: The widespread use of minimally invasive surgery (MIS) demands an appropriate framework to train novice surgeons (trainees) to perform MIS. One of the effective ways to establish a cooperative training system is to use virtual fixtures. In this paper, a guiding virtual fixture is proposed to correct the movements of the trainee according to trainer hand motion performing a real MIS surgery. The proposed training framework utilizes the position signals of trainer to modify incorrect movements of the trainee which leads to shaping the trainee's muscle memory. Thus, after enough training sessions the trainee gains sufficient experience to perform the surgical task without any further help from the trainer. The passivity approach is utilized to analyze the stability of system. Simulation results are also presented to demonstrate the effectiveness of the proposed method. | 2018 | Conference | Surgical Robotics | |
| Robust control of a non-minimum phase system in presence of actuator saturation Y Salehi, MA Sheikhi, M Motaharifar, HD Taghirad 2017 5th International Conference on Control, Instrumentation, and Automation (ICCIA) | Abstract: In this paper robust controller synthesis for a nonminimum phase (NMP) system in presence of actuator saturation is elaborated. The nonlinear model of a system is encapsulated with a nominal model and multiplicative uncertainties. Two robust control approaches namely mixed sensitivity H ∞ and μ-synthesis are compared from the robust stability and robust performance points of views. Finally, through simulation results it is demonstrated that both the robust controller approaches have superior performance compared to that of a conventional PID controller, while H ∞ controller performs best. | 2017 | Conference | Surgical Robotics | |
| An Observer-Based Force Reflection Robust Control for Dual User Haptic Surgical Training System M. Motaharifar and H. D. Taghirad 2017 5th RSI International Conference on Robotics and Mechatronics (ICRoM) | Abstract: This paper investigates the controller design problem for the dual user haptic surgical training system. In this system, the trainer and the trainee are interfaced together through their haptic devices and the surgical operations on the virtual environment is performed by the trainee. The trainer is able to interfere into the procedure in the case that any mistakes is made by the trainee. In the proposed structure, the force of the trainer's hands is reflected to the hands of the trainee to give necessary guidance to the trainee. The force signal is obtained from an unknown input high gain observer. The position of the trainee and the contact force with the environment are sent to the trainer to give him necessary information regarding the status of surgical operations. Stabilizing control laws are also designed for each haptic device and the stability of the closed loop nonlinear system is proven. Simulation results are presented to show the effectiveness of the proposed controller synthesis. | 2017 | Conference | Surgical Robotics | |
| Adaptive Control of Dual User Teleoperation with Time Delay and Dynamic Uncertainty M. Motaharifar, A. Bataleblu, and H. D. Taghirad 2016 24th Iranian Conference on Electrical Engineering (ICEE) | Abstract: This technical note aims at proposing an adaptive control scheme for dual-master trilateral teleoperation in the presence of communication delay and dynamic uncertainty in the parameters. The majority of existing control schemes for trilateral teleoperation systems have been developed for linear systems or nonlinear systems without dynamic uncertainty or time delay. However, in the practical teleoperation applications, the dynamics equations are nonlinear and contain uncertain parameters. In addition, the time delay in the communication channel mostly exists in the real applications and can affect the stability of closed loop system. As a result, an adaptive control methodology is proposed in this paper that to guarantee the stability and performance of the system despite nonlinearity, dynamic uncertainties and time delay. Simulation results are presented to show the effectiveness of the proposed adaptive controller methodology. | 2016 | Conference | Surgical Robotics | |
| Robust H-Infinity Control of a 2RT Parallel Robot For Eye Surgery Abbas Bataleblu, Mohammad Motaharifar, Ebrahim Abedlu, Hamid D. Taghirad 2016 4th International Conference on Robotics and Mechatronics (ICROM) | Abstract: This paper aims at designing a robust controller for a 2RT parallel robot for eye telesurgery. It presents two robust controllers designs and their performance in presence of actuator saturation limits. The nonlinear model of the robot is encapsulated with a linear model and multiplicative uncertainty using linear fractional transformations (LFT). Two different robust control namely, H ? and ?-synthesis are used and implemented. Results reveal that the controllers are capable to stabilize the closed loop system and to reduce the tracking error in the presence of the actuators saturation. Simulation results are presented to show that effectiveness of the controllers compared to that of conventional controller designs. Furthermore, it is observed that ?-synthesis controller has superior robust performance. | 2016 | Conference | Surgical Robotics | |
| Particle Filters for Non-Gaussian Hunt-Crossley Model of Environment in Bilateral Teleoperation Pedram Agand, Hamid D. Taghirad and Ali Khaki-Sedigh 2016 4th International Conference on Robotics and Mechatronics (ICROM) | Abstract: Optimal solution for nonlinear identification problem in the presence of non-Gaussian distribution measurement and process noises is generally not analytically tractable. Particle filters, known as sequential Monte Carlo method (SMC), is a suboptimal solution of recursive Bayesian approach which can provide robust unbiased estimation of nonlinear non-Gaussian problem with desire precision. On the other hand, Hunt-Crossley is a widespread nonlinear model for modeling telesurgeries environment. Hence, in this paper, particle filter is proposed to capture most of the nonlinearities in telesergerie environment model. An online Bayesian framework with conventional Monte Carlo method is employed to filter and predict position and force signals of environment at slave side respectively to achieve transparent and stable bilateral teleoperation simultaneously. Simulation results illustrate effectiveness of the algorithm by comparing the estimation and tracking errors of sampling importance resampling (SIR) with extended Kalman filter. | 2016 | Conference | Surgical Robotics | |
| Adaptive Control for Force-Reflecting Dual User Teleoperation Systems Sara Abkhofte, Mohammad Motaharifar, and Hamid D. Taghirad 2016 4th International Conference on Robotics and Mechatronics (ICROM) | Abstract: The aim of this paper is to develop an adaptive force reflection control scheme for dual master nonlinear teleoperation systems. Having a sense of contact forces is very important in applications of dual master teleopreation systems such as surgery training. However, most of the previous studies for dual master nonlinear teleoperation systems are limited in the stability analysis of force reflection control schemes. In this paper, it is assumed that the teleopreation system consists of two masters and a single slave manipulator. In addition, all communication channels are subject to unknown time delays. First, adaptive controllers are developed for each manipulator. Next, Input-to-State Stability (ISS) approach is used to analyze the stability of the closed loop system. Through simulation results, it is demonstrated that the proposed methodology is effective in a nonlinear teleopreation system. | 2016 | Conference | Surgical Robotics | |
| An Observer-Based Adaptive Impedance-Control for Robotic Arms: Case Study in SMOS Robot Soheil Gholami, Arash Arjmandi, and Hamid D. Taghirad 2016 4th International Conference on Robotics and Mechatronics (ICROM) | Abstract: In this paper an adaptive output-feedback impedance control is proposed to be used in environment-machine interaction applications. The proposed control is designed to achieve a desired robot impedance in the presence of possible dynamical parameter uncertainties. A high-gain observer is utilized in the control structure to achieve this objective by using only position feedback of robot joints, which in turn, reduces implementation costs and eliminates additional sensor requirements. Stability of the overall system is analyzed through input to state stability analysis. Finally, to evaluate the presented structure, computer simulations are provided and the scheme effectiveness is verified. | 2016 | Conference | Surgical Robotics | |
| Kinematic and Workspace Analysis of DIAMOND: An Innovative Eye Surgery Robot Amir Molaei, Ebrahim Abedloo, Hamid D. Taghirad and Zahra Marvi 2015 23rd Iranian Conference on Electrical Engineering | Abstract: This paper presents a new robot for eye surgeries, referred to as DIAMOND. It consists of a spherical mechanism that has a remote center of motion (RCM) point and is capable of orienting the surgical instrument about this unique point. Using the RCM as the insertion point of the surgery instruments makes the robot suitable for minimally invasive surgery applications. DIAMOND has two pairs of identical spherical serial limbs that form a closed kinematic chain leading to high stiffness. The spherical structure of the mechanism is compatible with the human head and the robot may perform the surgery upon the head without any collision with the patient. Furthermore, dexterity and having a compact size is taken into account in the mechanical design of the robot. The workspace of the robot is a complete singularity free sphere that covers the region needed for any eye surgeries. In this paper, a comparison between different types of existing eye surgery robots is presented, the structure of the mechanism is described in detail and kinematic analysis of the robot is investigated. | 2015 | Conference | Surgical Robotics | |
| Eye-RHAS Manipulator: From Kinematics to Trajectory Control Ebrahim Abedloo, Soheil Gholami, and Hamid D. Taghirad 2015 3rd RSI International Conference on Robotics and Mechatronics (ICROM) | Abstract: One of the challenging issues in the robotic technology is to use robotics arm for surgeries, especially in eye operations. Among the recently developed mechanisms for this purpose, there exists a robot, called Eye-RHAS, that presents sustainable precision in vitreo-retinal eye surgeries. In this work the closed-form dynamical model of this robot has been derived by Gibbs-Appell method. Furthermore, this formulation is verified through SimMechanics Toolbox of MATLAB. Finally, the robot is simulated in a real time trajectory control in a teleoperation scheme. The tracking errors show the effectiveness and applicability of the dynamic formulation to be used in the teleoperation schemes. | 2015 | Conference | Surgical Robotics | |
| Vision-Based Kinematic Calibration of Spherical Robots Pedram Agand, Hamid D. Taghirad and Amir Molaee 2015 3rd RSI International Conference on Robotics and Mechatronics (ICROM) | Abstract: In this article, a method to obtain spatial coordinate of spherical robot's moving platform using a single camera is proposed, and experimentally verified. The proposed method is an accurate, flexible and low-cost tool for the kinematic calibration of spherical-workspace mechanisms to achieve the desired accuracy in position. The sensitivity and efficiency of the provided method is thus evaluated. Furthermore, optimization of camera location is outlined subject to the prescribed cost functions. Finally, experimental analysis of the proposed calibration method on ARAS Eye surgery Robot (DIAMOND) is presented; In which the accuracy is obtained from three to six times better than the previous calibration. | 2015 | Conference | Surgical Robotics | |
| Sliding Impedance Control for Improving Transparency in Telesurgery Samim Khosravi, Arash Arjmandi and Hamid D. Taghirad 2014 Second RSI/ISM International Conference on Robotics and Mechatronics (ICRoM) | Abstract: This paper describes a novel control scheme for teleoperation with constant communication time delay and soft tissue in environment of slave side. This control scheme combine fidelity criteria with sliding impedance. Fidelity is a measure for evaluating telesurgical system when environment at slave side contains soft tissues. Sliding impedance is used to stabilize the teleoperating system with constant time delays and improve tracking performance in the presence of uncertainties in slave dynamics. The control system contains impedance and sliding impedance control in master and slave manipulators, respectively. Parameters of sliding impedance controller are obtained from fidelity optimization problem while parameters of master impedance controller are determined such that to guarantee stability of the entire teleopertaion system. Simulation results demonstrate suitable performance of position and force tracking of the telesurgical system. | 2014 | Conference | Surgical Robotics | |
| Analytical Passivity Analysis for Wave-based Teleoperation with Improved Trajectory Tracking Bita Fallahi, Hamid D. Taghirad Canadian Committee for the Theory of Machines and Mechanisms | Abstract: In wave based teleoperation, although passivity is ensured for any time delay, tracking performance is usually distorted due to the bias term introduced by wave transmission. To improve the position tracking error, one way is to augment the forward wave with a corrective term and achieve pas-sivity by tuning the band width of a low pass filter in the forward path. However, this filter fails to meet the passivity condition in contact to stiff environments, especially at steady state. In this paper a new method is proposed and an analytical solution for passivity at steady state and a semi analytical solution for all other frequencies are represented. This method significantly reduces the complexity of the closed-loop system, ensures passivity in contact to the stiff environments, and improves trajectory tracking. Simulation results are presented to show the effectiveness of the pro-posed method. | 2011 | Conference | Surgical Robotics | |
| Force Control of Intelligent Laparoscopic Forceps Soheil Kianzad, Soheil O. Karkouti, and Hamid D. Taghirad Journal of Medical Imaging and Health Informatics | Abstract: Actuators play an important role at the end-effectors of Minimally Invasive Surgery (MIS) robots. Having local, lightweight and powerful actuators would increase dexterity of surgeons. Shape Memory Alloy (SMA) actuators are considered as good candidates and presented significant behaviors in producing the force needed for grasping. Most of the current MIS systems provide surgeons with visual feedback. However, in many operations this information could not help surgeons to diagnose the manipulated tissue accurately. Therefore, having force and tactile information is also necessary. In order to have this information, local sensors are needed to give force feedback. This would also help to have control over the wire tension and prevent exceeding force causing tissue damages. In this paper a novel design of forceps that uses antagonistic SMA actuators is presented. This configuration helps to increase force and speed and also eliminates the bias spring used in similar works. Moreover, this antagonistic design makes it possible to place the force sensors at the back part of the forceps instead of attaching them to the jaws which results in a smaller forceps design. To control the exerted force, analytical model of system and a force control method are also presented. This enhanced design seems to address some of the existing shortcomings of similar models and remove them effectively. | 2011 | Journal | Surgical Robotics | |
| Identification and Robust H-Infinity Control of the Rotational/Translational Actuator System Mahdi Tavakoli, Hamid D. Taghirad, and Mehdi Abrishamchian International Journal of Control Automation and Systems | Abstract: The Rotational/Translational Actuator (RTAC) benchmark problem considers a fourth-order dynamical system involving the nonlinear interaction of a translational oscillator and an eccentric rotational proof mass. This problem has been posed to investigate the utility of a rotational actuator for stabilizing translational motion. In order to experimentally implement any of the model-based controllers proposed in the literature, the values of model parameters are required which are generally difficult to determine rigorously. In this paper, an approach to the least-squares estimation of the parameters of a system is formulated and practically applied to the RTAC system. On the other hand, this paper shows how to model a nonlinear system as a linear uncertain system via nonparametric system identification, in order to provide the information required for linear robust H-Infinity control design. This method is also applied to the RTAC system, which demonstrates severe nonlinearities due to the coupling from the rotational motion to the translational motion. Experimental results confirm that this approach can effectively condense the whole nonlinearities, uncertainties, and disturbances within the system into a favorable perturbation block. | 2005 | Journal | Surgical Robotics |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}