Increasing performance demands necessitate design of new types of robots with larger work space, being capable to perform at higher accelerations. In a cable-driven redundant parallel manipulator (CDRPM), the linear actuators of parallel manipulators are replaced with electrical powered cable drivers, which lead immediately to a larger work space. The idea of using cable driven redundant parallel manipulators, are not limited to only the applications where a very large work space is required, and this idea is effectively penetrated in the applications where precise and stiff robot is required to operate in high accelerations within a relatively larger work space than that attainable in conventional parallel robots. In our lab , several applications in which a CDRPM is used are introduced, and the challenging issues in the optimal kinematics structure, dynamics formulation, and control of such structure are studied.
Core Project
Control of CDR Considering Cable Dynamics
In many former studies, cable mass have been ignored against end-effector mass. In other words, the cables have been modeled as straight massless body. This assumption is valid for robots of small size carrying light payloads, but for such large scale robots, cannot be applicable anymore. In the latter case, the mass of long cables can lead to sagging effect. In summary, the sagging effect of cables can result in following problems: (1) increasing complexity of both kinematic and dynamic analysis (2) decreasing robot stiffness (3) reducing natural frequencies and undesirable vibrations. Wave-based control (WBC), as a newly-developed technique for mechanical flexible systems is proposed by ARAS group and applied to cable driven parallel manipulators to do position control and active vibration damping at the same time.
Project Manager: Ahmad Khalilpour
Project Manager: Ahmad Khalilpour
Deployabale CDRs
Over the last decade, many researches have studied in the field of cable robots, but still their applications are very limited compared to the conventional serial robots. Introducing a simple and deployable design for the cable driven robots may significantly influence their wider use in industrial applications. This causes the installation of the robot is not be limited to a fixed and well calibrated structure and high accuracy calibration process is no longer required. By this means the robot may be easily moved from one place to another. Such designs are considered to have rapidly deployable characteristics, which makes them more applicable. In deploy-able cable driven robots, kinematic dimensions and parameters of the robot is not accurately measured, and this uncertainty in the measurement will appear in the most of the robots model parameters. This introduces many challenges in terms of the controller design with the required performance for the designer. The goal of this project is to develop a theoretical framework for robust position control of CDPMs. To develop the idea, modeling uncertainties are taken into account and robust stability of the closed-loop system with proposed control algorithm is performed.
Sensor Fusion in Control of CDRs
Embedded in everyday life, sensors are the eyes and the ears of our robots. since they are not perfect and each one of them is telling a part of the story about the surrounded world, many researchers have tried to develop algorithms in order to fuse the data coming from many sensors into a more accurate and reliable final measurement. algorithms based on mathematical model and properties of the system under monitoring and the stochastic parameters of the sensors used. We, in CDRPM team of ARAS robotic group, are using sensors ranging from gyroscopes and accelerometers to cameras and motor load cells and encoders to calculate the required states and feedback data for controlling our suspended cable driven parallel robot using algorithms ranging from Kalman based filtering to state estimation and observer design techniques.
Project Managers: Rouhollah Khorrambakht
Featured Products
ARAS Cam
Developed in the ARAS robotics research group, ARAS-CAM robot is a fast deployable
suspended cable driven manipulator with three degrees of translational freedom. Owing to its large
workspace and easy installation process, the robot is a suitable tool for performing video capturing
tasks in sport fields or movie industries. ARAS-CAM is aimed to be a fast deploy-able robot. This agenda means that the robot should be
robust against uncertainties; the instrumentations should be maintainable in the field and, the
installation and calibration procedures must be fast and straightforward. As such, We, in the ARAS
PACR group, are investigating novel and efficient algorithms to realize this goal.
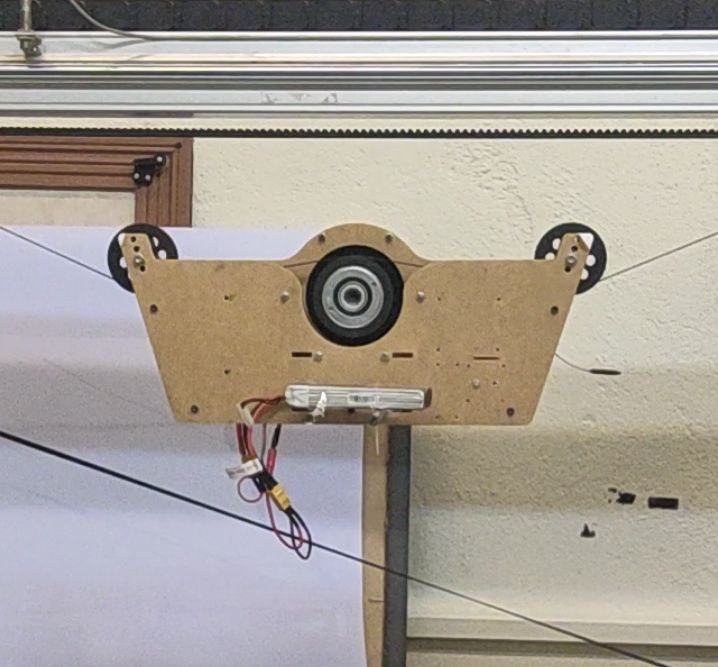
ARAS Cable Cam
ARAS Cable cam can be used as a camera which is used in many live events and hardly accessible recording situations. As it refers to its name it is a cable robot which has a two degree of freedom. This robot is a high speed rubost robot as the cable can garantee the speed and safety. This robot uses a brushless motor and core of stm32f103 with a firm body and lightly designed to transport and launch. And it is an aconomical low cost cable cam with affordable material and easily reconstructable and easily deploable.
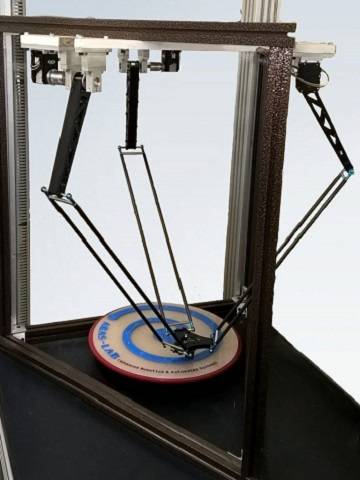
Delta Robot
Nulla sit amet rutrum nisi. Fusce ut augue eu sem venenatis consectetur in vitae nisl. Praesent ornare, sapien non iaculis scelerisque, mi erat imperdiet tortor, sed lacinia lorem ligula sit amet urna. Fusce luctus iaculis imperdiet. In augue libero, pulvinar quis fermentum quis, tincidunt vitae libero. Integer consequat, nunc ac euismod luctus, diam sem ornare quam, ut maximus lorem felis eu purus. In placerat nunc a sapien condimentum suscipit nec sit amet ante.

Kamal ol Molk
Kamal ol Molk is a cable robot with two degree of freedom and it is a suspended cable robot for painting. In this robot two single direct cable configurations are used to control the position of the robot. In this robot by adding The weight is created by moving the gravitational force necessary to keep the cables under tension. Plus weights Cables are added to the free end, which are responsible for compensating the weight, until the torque is applied to Keep the engine within tolerable range for the engine.
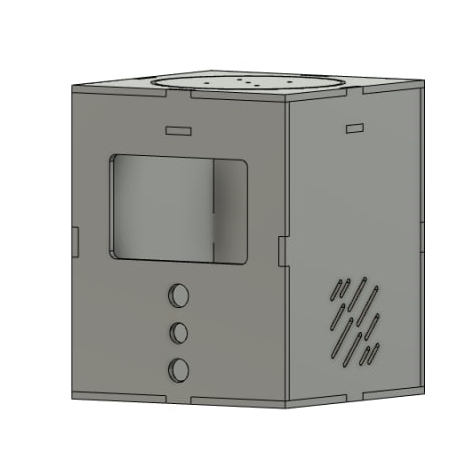
Smart Shelf
Smart shelf is a smart gadget created in ARAS Lab. As it’s title that refers to a type of interactive and intelligent robot. It can play an important role in advertising and coummunicating with customers. These interactive robots can be identified in a variety of ways and communicate with customers and get their opinion to buy the desired product. Use of light, sound and image, It is one of the methods used to attract the attention of the audience. In all these robots it is necessary to use Image and audio processing algorithms measure the characteristics of the intended user and in accordance with these characteristics,
Proper interaction with the user. The main bottleneck of this project is the presence of hardware devices with medium and economic processing core. Therefore the cost for these robots should be affordable have an economic justification.
Our Team
Philippe Cardou
Philippe Cardou received the B.Eng.degree in mechanical engineering from the Universite Laval, Quebec City, QC, Canada, in 2003, and the Ph.D. degree from McGill University, Montreal, QC, in 2008. In 2007, he joined the Department of Mechanical Engineering, Universite Laval, where he has been an Assistant Professor, since 2008. Since 2008, he has been an Associate Editor of the Transactions of the Canadian Society for Mechanical Engineering. His research interests include kinematics and optimization, with emphasis on two specific applications: the measurement of rigid-body displacements from accelerometers and the dimensional synthesis of mechanisms. Dr. Cardou is a member of the American Society of Mechanical Engineers. He specializes in the design of robots and articulated mechanisms. In his perpetual quest for “the optimal solution”, he tries to combine the creativity of the designer with the computing power of computers.

Clement Gosselin received his Ph.D. degree from McGill University, Montreal, Quebec, Canada in 1988. He was appointed by the Department of Mechanical Engineering at Universite Laval, Quebec where he is a Full Professor since 1997. He is currently holding a Canada Research Chair in Robotics and Mechatronics since January 2001. His research interests include robotic mechanical systems, robotic hands, parallel mechanisms, cable-driven mechanisms, physical human-robot interaction and others. His work in these areas has been the subject of two books as well as numerous publications and patents. He has received several awards including the Gold Medal of the Governor General of Canada for undergraduate studies in 1985, the I. Ω. Smith Award from CSME for creative engineering in 1993, the ASME DED Mechanisms and Robotics Committee Award in 2008, the ASME Machine Design Award in 2013, the Queen Elizabeth II Diamond Jubilee Medal for excellence in research in 2013.

Meyer Nahon received the B.A.Sc. degree in mechanical engineering from Queen’s University, Kingston, ON, Canada, the M.A.Sc. degree in aerospace engineering from the University of Toronto, Toronto, ON, and the Ph.D. degree in mechanical engineering from McGill University, Montreal, QC, Canada. From 1991 to 2001, he was an Assistant and Associate Professor in mechanical engineering with the University of Victoria, Victoria, BC, Canada. Since then, he has been an Associate Professor in mechanical engineering with the Centre for Intelligent Machines, McGill University. His present research deals with various aspects of dynamics and control of aerial and marine vehicles and systems, with a particular emphasis on tethered systems. Dr. Nahon is an Associate Fellow of the AIAA and Fellow of the Canadian Aeronautics and Space Institute (CASI). He was the recipient of awards from the AIAA and CASI for his work on flight-simulator motion systems and on space-based robot.

Jorge Angeles received the B. Eng. and M.Sc. degrees in Mechanical Engineering from the Universidad Nacional Autónoma de México (UNAM), and the Ph.D. degree from Stanford University. He is currently James Professor at McGill University. The focus of his research is design and control of robotic mechanical systems at large as well as their mechanical components, such as drives and sensors. A major activity there is the development of speed reducers meeting the strict requirements of robotic and mechatronic applications: low backlash; low friction; and high stiffness. On robot design, he stresses on robustness regarding their kinetostatic, elastostatic and elastodynamic performances.

Tobias Bruckmann received the Dipl.-Ing. in Mechanical Engineering from the University Duisburg-Essen, Duisburg, Germany, in 2004 and the Dr.-Ing. in 2010. He is currently working as a Senior Engineer at the Chair for Mechatronics, University Duisburg-Essen, where he is leading a research team with experiences in numerous fields of robotics, including cable-driven parallel manipulators, construction machines and human-machine interaction. His interests focus on Cable-driven parallel robots (wire robots), Real-time systems and automation, Kinematics, simulation, and control of multi-body systems, Workspace analysis and synthesis of rope-driven Stewart platforms, Interval arithmetic.

Mehdi Tale Masouleh received the B. Eng. M. Sc. and Ph.D. degrees in Mechanical engineering (Robotic) from the Laval University, Québec, Canada, in 2006 , 2007 and 2010, respectively, under the supervision of Prof. Gosselin and Prof. Husty. He is currently a faculty member of Electrical and Computer Engineering of University of Tehran. He is also the director of Human-Robot Interaction Laboratory, known as TaarLab for its Persian abbreviation. His research interests are kinematics, dynamic and design of serial and parallel robotic systems, Humanoid, mobile robots and optimization techniques (interval analysis and convex optimization …) for robotic applications.

Ali Hassani was born in Tehran, Iran in 1996. He received his B.Sc degree in Mechanical Engineering from Shahid Chamran University (Jundi Shapur), Ahvaz, Iran in 2018. He is currently a M.Sc student in Mechatronics Engineering at K.N. Toosi University, Tehran, Iran. He joined ARAS group under supervision of Dr. Hamid D. Taghirad since October 2018. His current research interests includes various aspects of Dynamics and Control of Parallel Robots.


Amir Saman Mirjalili
As a Mechatronics Engineering graduate from Khaje Nasir University, I have honed my expertise in the field of robotics through extensive research and hands-on involvement in a wide array of robotics projects. My academic journey culminated in a profound involvement with parallel and cable-driven robots, areas where my contributions have not only been substantial but also innovative. Specializing in the dynamics and kinematics of robotics, alongside precise robot calibration, my work seeks to bridge theoretical knowledge with practical applications to solve complex challenges in robotics engineering. Throughout my master’s program, I delved deep into the intricacies of robotic systems, focusing on enhancing their efficiency, accuracy, and reliability. My dedication to exploring the mechanical and computational aspects of robots has equipped me with a robust set of skills, enabling me to contribute significantly to the design, development, and optimization of robotic solutions. As a researcher, my goal has always been to push the boundaries of what’s possible in robotics, leveraging advanced techniques to improve robotic performance and adaptability. My passion for robotics research is driven by a commitment to advancing the field through innovation, collaboration, and continuous learning.

Mohammad Reza Jafari
Mohammad Reza Jafari Harandi received his B.Sc. and M.Sc. degree in Electrical Engineering from Sharif University of Technology in 2014 and 2016 respectively. Then he received his Ph.D. in Control Engineering from K. N. Toosi University, Tehran, Iran, in 2021. His current research interests include various aspects including stabilization of underactuated robots, adaptive control, passivity based control, power systems, parallel and cable-driven robots.

Mohammad Mahdi Kalantari
Mohammad Mahdi was born in Qom, Iran, in 1997. He has commenced microcontroller programming since primary school, then pursued robotics since guidance school (in Shahid Qoddusi-NODET). By starting high school, he succeeded in Instrumentation followed by AI. Then he performed his undergraduate studies in Electrical Engineering (Control Branch) at Shahed University where he fulfilled his thesis on RL. Presently he is pursuing his M.Sc. in Control Engineering at K.N. Toosi University of Technology, Tehran, Iran. Applied science has always been his passion in every sense of the word.

Mohammad Bajelani
Hi there, my name is Mohammad Bajelani. I was born in Tehran, Iran, in 1998. I have been graduated in (Aerospace Engineering) from K.N Toosi University of Technology in 2020. My bachelor’s background involves designing and programming Autopilot and multirotor HIL test-bed. I’ve currently joined to (PACR ARAS group) as an M.Sc. student. I’m interested in implementing RL-based controllers in the Mechatronics system.

Mohammad Reza Dindarloo
Mohammadreza Dindarloo is a graduate student in Control Engineering at K. N. Toosi University of Technology, Tehran, Iran. He is a member of the parallel and cable robots (PACR) group in the Advanced Robotics and Automated System (ARAS) Lab under the supervision of Prof. Hamid D. Taghirad. He did his bachelor’s thesis in the surgical robotic (SR) group in ARAS. His main research interest includes robot localization, perception, SLAM, sensor fusion, factor graph and etc. He is also interested in doing research in Control theory, Artificial intelligence Deep Neural network algorithms.

Ali Salimian
I’m Ali Salimian. I’m in the last year of my bachelor’s studies in Electrical Engineering. I’m interested in Machine Learning, Image Processing, and Computational Methods. Currently, I’m working in ARAS robotic lab on a computational algorithm to generate fabricable marquetry art. The task consists of two phases: a segmentation procedure followed by a search to find the fittest region of woods for each segment.

Mehdi Vakili
Mehdi Vakili was born in Tehran, Iran. He entered K. N. Toosi University of technology with top rank admission and he is in last year B. Sc. in Control engineering. He joined Advanced Robotics and Automated System (ARAS) Lab under supervision of Prof. Hamid D. Taghirad in Nov. 2021. His current project is the implementation of Smart Shelf, low cost intelligent gadget, consists of computer vision and real-time interactive tasks. His major intrests are in embedded systems, microcontroller programming, AI, deeplearning, computer vision, robotics.

Ali Pazani
Ali Pazani was born on July 26, 2000, in Tehran. He entered K. N. Toosi University of Technology in 2018 and is in his last year in B. Sc. Electrical Engineering. He joined ARAS Lab in July 2021. His major interests are control systems, Robotics, programming microcontrollers, AI, and machine learning. He is now working on Wi-Fi interaction between robot and android application over a TCP connection in the Kamal-ol-Molk project.

Alireza Zahedi
Alireza Zahedi was born on July 28, 2000, in Tehran. He started his bachelor’s in Electrical Engineering at K. N. Toosi University Of Technology in September 2018 and now he is a senior student. He joined ARAS Group in May 2021 under the supervision of Prof. Hamid. D Taghirad. His interest in CDPRs led him to work as a member of the PACR group. His main project is about designing Kamal-Ol-Molk II, an easily deployable cable-based portrayer robot. His interests are mainly in Robotics, Control systems, and AI.

Aria Saki
Aria Saki was born on March 14, 2002 in Khorram Abad. He started his bachelor in Electrical Engineering at K. N. Toosi University Of Technology in September 2020 and now he is a sophomore student. He joined ARAS Group in January 2022 under supervision of Prof. Hamid. D Taghirad. His interest in CDPRs led him to work as a member of the PACR group. His main project is about designing ARAS Cable cam, an easily deployable cable-based camera robot. His other interests are mainly about Robotics, Electronics and Programming.

Nasrollah Khodadadi
I obtained my B. Sc. degree in 2017 from Isfahan University of Technology (IUT) in the field of mechanical engineering. I’m currently pursuing my M. Sc. degree in Mechatronics engineering at K.N.Toosi University of Technology in Tehran, Iran. Currently, I am a member of the Cable-Driven Robots(CDR) group in ARAS lab. My main research interest is design and analysis of cable robotic manipulators and currently, I work on Design, Implementation and analysis of a deployable and fast fully constrained planner cable-driven robot.
- Sara Abkhofte, Pedram Agand, Mohammad Savadzadeh, Rashid Mokhtari, Bita Fallahi, Omid Gerami, Maryam Salimifar, Samim Khosravi, Soheil Gholami, Zahra Marvi, Kamran Taran, Maryam Moafi Madani, Bahareh Sabouri, Ali Alipour, Farbid Farshidian.
Publications
| Title | Abstract | Year | Type | Research Group | |
|---|---|---|---|---|---|
| Solution of matching equations of IDA-PBC by Pfaffian differential equations M Reza J Harandi, Hamid D Taghirad International Journal of Control | Abstract: Finding the general solution of partial differential equations (PDEs) is essential for controller design in newly developed methods. Interconnection and damping assignment passivity-based control (IDA-PBC) is one of such methods in which the solution to corresponding PDEs which are called matching equations is needed to apply it in practice. In this paper, these matching equations are transformed to corresponding Pfaffian differential equations. Furthermore, it is shown that upon satisfaction of the integrability condition, the solution to the corresponding third-order Pfaffian differential equation may be obtained quite easily. The method is applied to the PDEs of IDA-PBC in some benchmark systems such as Magnetic levitation system, Pendubot, and underactuated cable-driven robot to verify its applicability. | 2022 | Journal | Parallel and Cable Robotics | |
| Marker Correspondence Initialization in an IR Motion Capturing System MM Kalantari, R Khorrambakht, MR Dindarloo, SA Khalilpour, HD Taghirad, P Cardou IEEE | Abstract: Marker-based motion capturing (MoCap) systems are of great importance among the different visual referencing systems, because of their robustness, speed, and precision. Due to the lack of highly descriptive visual features in captured images in such systems, establishing the correspondences between the multi-view observations of the markers is a major challenge. This problem is even more challenging when there is no preceding or low reliable data on the markers’ positions. Under these conditions, the correspondences have to be found from a large space of possible matches. This paper aims to provide a solution for this correspondence initialization problem in multi-view tracking systems based on graph theory and Girvan-Newman community detection. The validity and robustness of the algorithm are verified via experimental analysis. | 2022 | Conference | Parallel and Cable Robotics | |
| Adaptive energy shaping control of a 3-DOF underactuated cable-driven parallel robot M Reza J Harandi, S Ahmad Khalilpour, Hamid D Taghirad IEEE Transactions on Industrial Informatics | Abstract: In underactuated robots (URs) with closed kinematic chains, the task space configuration variables are coupled through complex dynamics. In this paper, the regulation control of a 3-DOF underactuated cable-driven parallel robot is investigated by using the interconnection and damping assignment passivity based control (IDA-PBC) approach which is designed based on the solution of some challenging partial differential equations (PDEs). Additionally, as cables can only pull, positive tension in cables shall also be taken into account. Here, the corresponding PDE for controller design is solved by transforming the PDE into some Pfaffian differential equations. Then, boundedness of control efforts are ensured via suitable modification of the gains. Furthermore, an adaptation law for the mass of the robot is designed and the system stability is investigated through Lyapunov direct method. The efficiency of the … | 2022 | Journal | Parallel and Cable Robotics | |
| Adaptive dynamic feedback control of parallel robots with unknown kinematic and dynamic properties M Reza J Harandi, S Ahmad Khalilpour, Hamid D Taghirad ISA transactions | Abstract: Uncertainties in dynamic and kinematic parameters are unavoidable components in the control of robotic manipulators. Although calibration is a well-known method to reject this issue, it is time-consuming, some parameters may be altered slowly, and therefore, it is not applicable to some special cases such as deployable cable-driven robots. This paper addresses an adaptive dynamic feedback controller in which the adaptation laws together with new states could remedy these shortcomings and may be appropriately used in deployable cable-driven robots. For this purpose, the Jacobian matrix and its determinant are expressed in regressor form. Additionally, a non-singular sliding surface is considered for the trajectory tracking error. The fast finite-time feasible trajectory tracking is ensured by Lyapunov direct method using an appropriate design of adaptation laws of unknown parameters together with dynamical … | 2022 | Journal | Parallel and Cable Robotics | |
| Joint Space Control of a Deployable Cable Driven Parallel Robot with Redundant Actuators S Ahmad Khalilpour, A Hassani, R Khorambakht, AR Zahedi, A Bataleblu, HD Taghirad 2022 30th International Conference on Electrical | Abstract: Cable-driven parallel robots with redundant actuators are faced with the problem of loose cables, especially when the robot is deployable and controlled within the joint space. This paper aims to addresses this shortcoming by proposing a suitable robust controller which requires no expensive positioning sensors such as laser trackers. The robot’s embedded force sensors are used alongside a new sliding surface for the robust controller to avoid loose cables even in the presence of kinematic and dynamic uncertainties. Therefore, conventional joint-space controllers are modified to become applicable for cable-driven robots, while assuring positive cable tensions. Implementation results on the ARAS suspended cable-driven parallel robot illustrate the effectiveness of the proposed control architecture and the feasibility of stable solutions. | 2022 | Conference | Parallel and Cable Robotics | |
| Full dynamic model of 3-UPU translational parallel manipulator for model-based control schemes A Hassani, SA Khalilpour, A Bataleblu, HD Taghirad Robotica | Abstract: Optimal mechanical design, model-based control, and robot dynamic calibration mainly rely on the analytical formulation of robot dynamics. In this paper, the kinematics equations of a general 3-UPU translational parallel manipulator (TPM) are derived, and then, by using the principle of the virtual work theorem, the full implicit dynamic model is derived. Furthermore, by making some modifications, the explicit dynamic formulation of the robot is attained, which is the basis of a wide range of advanced model-based controllers. To validate the proposed formulation, a prototype of the 3-UPU TPM is modeled in MSC-ADAMS® software, and the results of the dynamic formulation are validated using this model. The results show the high accuracy of the proposed dynamic formulation presented in this article. | 2022 | Journal | Parallel and Cable Robotics | |
| Time-Delay Learning-Based Controller for Fully-Constrained Cable-Driven Parallel Robots Mohammad Bajelani, S Ahmad Khalilpour, M Isaac Hosseini, S Ali A Moosavian, Hamid D Taghirad 2022 8th International Conference on Control, Instrumentation and Automation (ICCIA) | Abstract: Despite model-based approaches are capable of providing acceptable performance, but they require complex dynamics modeling, which make them difficult to apply. To overcome this problem, a time-delay learning-based controller as a model-free approach is proposed for fully-constrained cable-driven parallel robots (CDPRs) considering the positive cable force constraints and actuator limitations. The proposed method uses the memory of control effort as a learning element to linearize the system. In addition, using a saturation function in control law has provided the opportunity to ensure all the cables are bounded and remain in tension, to guarantee both the positive cable forces and actuator limitation. Moreover, in the proposed method, we are able to eliminate the requirement of measurement of the task variables, which is very costly by using expensive external positioning measurement systems. Finally, a … | 2022 | Conference | Parallel and Cable Robotics | |
| Regulation Control of a Suspended Cable-Driven Robot via Energy Shaping M Reza J Harandi, Amir Molaei, Hamid D Taghirad 2021 60th IEEE Conference on Decision and Control (CDC) | Abstract:In underactuated robots (URs), the motion of the unactuated configuration variable is coupled to that of the others by complex dynamics, which makes their control complicated. Additionally, if the UR is a cable-driven robot (CDR), as cables merely support tensile force, the positiveness of the cable’s tension should also be taken into account in controller design. In this paper, we investigate the regulation control of a suspended three degrees of freedom (DOF) CDR using interconnection and damping assignment passivity-based control (IDA-PBC) via potential energy shaping. This method requires analytical solutions to a set of partial differential equations (PDEs). The IDA-PBC approach for the control of the three-DOF CDR results in a complex PDE that cannot be analytically solved using the proposed methods in the literature. To this aim, we transform the governing PDE into a number of Pfaffian differential … | 2021 | Conference | Parallel and Cable Robotics | |
| Adaptive interconnection and damping assignment passivity‐based control for an underactuated cable‐driven robot M Reza J. Harandi, Hamid D Taghirad International Journal of Adaptive Control and Signal Processing | Abstract:Interconnection and damping assignment passivity‐based control (IDA‐PBC) provides a general framework to stabilize underactuated mechanical systems by assigning the desired Hamiltonian to the system, which is obtained from the solution of partial differential equations. In this article, the IDA‐PBC method is applied to an underactuated cable‐driven robot to stabilize out‐of‐plane motion of the system. An adaptation law for the system's mass is designed such that asymptotic stability is ensured with positive tension in cables through the direct Lyapunov method. The results are verified through some simulations. | 2021 | Journal | Parallel and Cable Robotics | |
| Adaptive motion control of parallel robots with kinematic and dynamic uncertainties M. Reza J. Harandi, S. A. Khalilpour, Hamid. D. Taghirad, Jose Guadalupe Romero arXiv preprint arXiv:2003.08860 | Abstract: One of the most challenging issues in adaptive control of robot manipulators with kinematic uncertainties is requirement of the inverse of Jacobian matrix in regressor form. This requirement is inevitable in the case of the control of parallel robots, whose dynamic equations are written directly in the task space. In this paper, an adaptive controller is designed for parallel robots based on representation of Jacobian matrix in regressor form, such that asymptotic trajectory tracking is ensured. The main idea is separation of determinant and adjugate of Jacobian matrix and then organize new regressor forms. Simulation and experimental results on a 2--DOF R\underline{P}R and 3--DOF redundant cable driven robot, verify promising performance of the proposed methods. | 2021 | Preprint | Parallel and Cable Robotics | |
| Adaptive control of parallel robots with uncertain kinematics and dynamics MRJ Harandi, SA Khalilpour, HD Taghirad, JG Romero Mechanical Systems and Signal Processing | Abstract: One of the most challenging issues in adaptive control of robot manipulators with kinematic uncertainties is the requirement of inverse Jacobian matrix in regressor form. This requirement is inevitable in the case of the control of parallel robots, whose dynamics formulation are derived in the task space. In this paper, an adaptive controller is proposed for parallel robots based on representation of Jacobian matrix in regressor form with asymptotic trajectory tracking. | 2021 | Journal | Parallel and Cable Robotics | |
Brain Emotional Learning based Intelligent Controller for a Cable-Driven Parallel Robot Mohammad Bajelani, S Ahmad Khalilpour, M Isaac Hosseini, Hamid D Taghirad, Philippe Cardou 2021 9th RSI International Conference on Robotics and Mechatronics (ICRoM) | Abstract: Concerning the lack of knowledge about non- linearity and uncertainties existing in the cable-driven robot models, an intelligent controller is proposed in this paper to overcome the lack of knowledge. Brain Emotional Learning is one of the bio-inspired algorithms which mimics the emotional part of the mammals’ brain. Not only does the Brain Emotional Learning Based Intelligent Controller (BELBIC) enable us to reach quick adaptation and robustness, but the computations are also very efficient. By defining the BELBIC learning functions with saturation functions, it is shown that the need to calculate the Jacobian matrix and forward kinematics in the feedback loop is eliminated, while guaranteeing positive tensions to the robot. The performance of the proposed method is examined by experiments, and results show that BELBIC can perform well in terms of tracking error. | 2021 | Conference | Parallel and Cable Robotics | |
| Adaptive motion control of parallel robots with kinematic and dynamic uncertainties MRJ Harandi, SA Khalilpour, H Taghirad, JG Romero arXiv preprint arXiv:2003.08860 | Abstract: One of the most challenging issues in adaptive control of robot manipulators with kinematic uncertainties is requirement of the inverse of Jacobian matrix in regressor form. This requirement is inevitable in the case of the control of parallel robots, whose dynamic equations are written directly in the task space. In this paper, an adaptive controller is designed for parallel robots based on representation of Jacobian matrix in regressor form, such that asymptotic trajectory tracking is ensured. The main idea is separation of determinant and adjugate of Jacobian matrix and then organize new regressor forms. Simulation and experimental results on a 2--DOF R\underline{P}R and 3--DOF redundant cable driven robot, verify promising performance of the proposed methods. | 2020 | Preprint | Parallel and Cable Robotics | |
| Robust H∞-based control of ARAS-diamond: A vitrectomy eye surgery robot A Bataleblu, R Khorrambakht, HD Taghirad Proceedings of the Institution of Mechanical Engineers | Abstract: In this paper, we investigate the challenges of controlling the ARAS-Diamond robot for robotic-assisted eye surgery adjustment | 2020 | Journal | Parallel and Cable Robotics | |
| Tip-trajectory tracking control of a deployable cable-driven robot via output redefinition SA Khalilpour, R Khorrambakht, H Damirchi, HD Taghirad, P Cardou Multibody System Dynamics | Abstract: In this paper, Large-scale deployable cable-driven robots face a lack of kinematic precision, and the cable dynamics impose considerable challenges in terms of controller design. The problem’s complexity increases because a deployable robot may not exploit expensive and highly accurate of measurement devices. | 2020 | Journal | Parallel and Cable Robotics | |
| Dual space control of a deployable cable driven robot: wave based approach SA Khalilpour, R Khorrambakht, H Taghirad, P Cardou International Journal of Robotics, Theory and Applications | Abstract: Known for their lower costs and numerous applications, cable robots are an attractive research field in robotic community. However, considering the fact that they require an accurate installation procedure and calibration routine, they have not yet found their true place in real-world applications. This paper aims to propose a new controller strategy that requires no meticulous calibration and installation procedures and can handle the uncertainties induced as a result of that. It is well known that kinematic uncertainties can lead to loose cables when one deals with a redundantly actuated robot. The control methodology presented in this paper is a simple yet powerful controller based on wave-based theory that can handle the aforementioned loosened cables | 2020 | Journal | Parallel and Cable Robotics | |
| System identification and H∞-based control of quadrotor attitude A Noormohammadi-Asl, O Esrafilian, MA Arzati, HD Taghirad Mechanical Systems and Signal Processing | Abstract: The attitude control of a quadrotor is a fundamental problem, which has a pivotal role in a quadrotor stabilization and control. What makes this problem more challenging is the presence of uncertainty such as unmodelled dynamics and unknown parameters. In this paper, to cope with uncertainty, an control approach is adopted for a real quadrotor | 2020 | Journal | Parallel and Cable Robotics | |
| Robust cascade control of a deployable cable-driven robot S.A. Khalilpour, R. Khorrambakht, H.D. Taghirad, Philippe Cardou Mechanical Systems and Signal Processing | Abstract: In this paper, we derive the dynamic formulation of a deployable cable-driven robot that considers models of the actuator and power transmission systems, and we investigate the challenges of structural uncertainty. To accommodate the inherent uncertainty of the system, we propose a proper control topology based on a cascade structure. The inner loop of the structure controls the cable forces, and the outer loop tracks the precise position of the robots end-effector. For the design of the outer loop controller, we propose a robust sliding mode controller with a stability analysis that is based on the Lyapunov direct method. The main contribution of this paper is to analyze the stability of the system as a whole considering both the inner and outer loop controllers. Finally, in order to illustrate the performance of the proposed controller, we present the results of an experiment on a deployable suspended cable-driven robot, which shows the effectiveness of the proposed controller in the presence of the inherent uncertainties of the system. | 2019 | Journal | Parallel and Cable Robotics | |
| Joint-Space Position Control of a Deployable Cable Driven Robot in Joint Space Using Force Sensors and Actuator Encoders S.A. Khalilpour, R. Khorrambakht, A. Bourbour, H.D. Taghirad Modares Mechanical Engineering | Abstract: Despite the intense development of cable-driven robot in recent years, they have not yet been | 2019 | Journal | Parallel and Cable Robotics | |
| Experimental Performance of Adaptive Fast Terminal Sliding Mode Control on a Suspended Cable Robot Mohammad Isaac Hosseini, Mohammad Reza Jafari Harandi, Seyed Ahmad Khalilpour, Hamid Taghirad The Journal of Electrical and Computer Engineering Innovations | Abstract: Fast-tracking of reference trajectory and performance improvement in | 2019 | Journal | Parallel and Cable Robotics | |
| Adaptive Fast Terminal Sliding Mode Control of A Suspended Cable–Driven Robot M Hosseini, M. J. Harandi, S. A. Khalilpour Seyedi, H.D. taghirad 2019 27th Iranian Conference on Electrical Engineering (ICEE) | Abstract: Increasing the speed and precision of operation in | 2019 | Conference | Parallel and Cable Robotics | |
| Point-to-Point Motion Control of An Underactuated Planar Cable Driven Robot Mohammad Reza Jafari Harandi, Hamed Damirchi, Seyed ahmad Khalilpour seyedi and Hamid Dokht Taghirad 2019 27th Iranian Conference on Electrical Engineering (ICEE) | Abstract: Despite being vastly investigated for underactuated | 2019 | Conference | Parallel and Cable Robotics | |
| ARAS-IREF: An Open-Source Low Cost Framework for Pose Estimation H. Damirchi, R. Khorrambakht, H. D. Taghirad International Conference on Robotics and Mechatronics | Despite the amount of research reported on state estimation and sensor fusion in the field of robotics, there are no well known low-cost solutions for a referencing system to determine the accuracy of developed methods by providing a suitable ground truth for them. In this paper an efficient and accurate 6–DoF pose measurement system is proposed and implemented on a spherical parallel robot using IR LEDs. This approach uses the perspective-n-point algorithm to derive the transformation matrix representing the accurate relative pose of the end-effector with respect to an inertial frame. Exploiting a visible light filter in front of the camera has rendered this approach robust against illumination changes. Furthermore, it allows for mitigating the rolling shutter effects by reducing the exposure time. Finally, a custom made testing module is proposed to verify the accuracy of the proposed device, and the calibration process proves the accuracy and efficiency of the system. | 2019 | Conference | Parallel and Cable Robotics | |
| A Calibration Framework for Deployable Cable Driven Parallel Robots with Flexible Cables R. Khorrambakht, H. Damirchi, S. A. Khalilpour∗, and H. D. Taghirad International Conference on Robotics and Mechatronics | Due to their simple and inexpensive structures, suspended cable driven parallel robots are suitable choices for many real-world applications. However, only when the accurate kinematic parameters are available, can we control the robot to the best of its abilities. This is specially a stringent requirement for fast deployable cable driven robots. With the aim of addressing these needs, in this paper we propose an effective framework for calibrating the kinematic parameters of suspended cable driven parallel robots with no requirements for expensive tools and measurement devices. Moreover, the proposed algorithm utilizes the existing force sensors in the cable robot to nominate the best set of data for calibration. The integrity and effectiveness of this framework is reported through simulation and practical experiments, which verifies promising horizons for deployable real-world applications. | 2019 | Conference | Parallel and Cable Robotics | |
| Stabilization of Cable Driven Robots Using Interconnection Matrix: Ensuring Positive Tension M. R. J. Harandi, S. A. Khalilpour, Hamed Damirchi and Hamid. D. Taghirad International Conference on Robotics and Mechatronics | Cable driven parallel robots are closed-loop kinematic chains, where the end-effector is attached to the base by a number of cables. Because of the nature of cables, a major issue in control of these robots is ensuring positive tensions. When the robot is not redundant, this issue is of utmost importance for the controller synthesis. In the case of point to point motion control, the trajectory is not specified beforehand, thus negative tension may occur. In order to resolve this issue, interconnection and damping assignment passivity based control (IDA-PBC) is employed. IDA-PBC is a well-known method for control of underactuated systems where desired damping and interconnection between subsystems are imposed. Interconnection matrix is a skew-symmetric matrix which doesn’t have an effect on stability, but it greatly influences the transient response of the system. In this paper, the interconnection matrix is exploited to ensure positive tension in fully actuated cable driven robots. The results are verified through simulation on a 3-DOF suspended cable driven robot. | 2019 | Conference | Parallel and Cable Robotics | |
| Extracting of Sagging Profile of Overhead Power Transmission Line Via Image Processing Amir Molaei, Hamid D.Taghirad, Javad Dargahi 2018 IEEE Canadian Conference on Electrical & Computer Engineering (CCECE) | Abstract: Sagging of the conductor in transmission line has a vital role in the safety, reliability and efficiency of power transmission. Transmission lines must be designed to guarantee the maximum static loading capacity. This is done by maintaining the minimum vertical clearance between the cables and the ground. However, the increase of the cable length between two tower, leads to the high cost of material and electrical energy loss, as well as increasing the possibility of intervention. On the other hand, reducing the line sagging induces high tension in the conductor, which may lead to damage of the conductor. To assure a safety sagging profile, an inspection is essential at the establishment and maintainance of the power transmission lines. In this paper firstly the mathematical formulation of long and heavy cables are developed. Then an image processing method is applied for inspection of cable sagging. To investigate the method a reconfigurable experimental setup is designed to provide various sagging profiles and the sagging profile is extracted via image processing and the result is compared to that of analytical method. | 2018 | Conference | Parallel and Cable Robotics | |
| Robust Dynamic Sliding Mode Control of a Deployable Cable Driven Robot S. A. Khalipour, R. Khorrambakht, M. J. Harandi, H. D. D. Taghirad and Philippe Cardou Electrical Engineering (ICEE), Iranian Conference on | Abstract: Despite of bing intensively developed, cable driven parallel manipulators are not yet vastly used due to their requirements for accurate assembly and installation. The main goal of this paper is to propose a suitable control method by which the robot could be suitably controlled without the requirement for undergoing any accurate calibration process. Here this robot is called deployable cable driven manipulator, in which the positions of the cable attachment points are not accurately known. This uncertainty in measurements will affect many parameters in the kinematic model especially the Jacobian matrix which is used as a force distributer in the Cartesian-space control strategies. In this paper in order to overcome this problem, a robust dynamic sliding mode controller is proposed. Then robust stability of the closed-loop system is analyzed through the Lyapunov direct method and by accordingly appropriate controller gain selection is performed. In order to illustrate the performance of the proposed controller, the robot is simulated in ADAMS software and it is shown that a suitable controller performance could be achieved. | 2018 | Conference | Parallel and Cable Robotics | |
| Wave Based Control of A Deployable Cable Driven Robot S. A. Khalilpour, R. Khorrambakht, H. D. Taghirad, and Philippe Cardou 2018 6th RSI International Conference on Robotics and Mechatronics (IcRoM) | Abstract: Cable driven parallel manipulator are known by their low costs and numerous applications. However despite of all research interests and developed methods they are not yet vastly used in action. The reason for this, is their limiting requirements for accurate assembly and installation process. The main goal of this paper is to propose a suitable control method by which the robot could appropriately be controlled, requiring no accurate calibrations or precise sensors. As it is well known, uncertainty in kinematics equations can lead to loose cables in redundant robots controlled through joint space controllers. In this paper a simple but very effective joint space controller is proposed that addresses the problem of loose cables by a wave based control method by employing a novel force feedback scheme. Indeed, a new conceptual framework for controlling deployable cable driven parallel manipulators is introduced by which such robots are greatly empowered at real-world scenarios. Finally, the performance of the proposed controller and its effectiveness is verified through some practical experiments showing that the proposed controller outperforms conventional cascade topologies in terms of much smoother tracking performance. | 2018 | Conference | Parallel and Cable Robotics | |
| Forward Kinematics Resolution of A Deployable Cable Robot S. A. Khalilpour , A. Bourbour, R. Khorrambakht, S. Kariminasab, H. D. Taghirad 2017 5th RSI International Conference on Robotics and Mechatronics (ICRoM) | Abstract: In this paper, forward kinematic derivation of a deployable suspended cable robot (DSCR) is investigated. Since the positions of the cable attachment points in this robot are not accurately available, the forward kinematics of the robot would not provide an accurate estimate for the end effector position. This paper proposes two methods to improve the accuracy of the forward kinematic solutions. First, an analysis on parameter sensitivity is presented and effective parameters are extracted. Then, based on these parameters and by using the redundant equations of the DSCR, a new set of equations for forward kinematic analysis are derived. The second method proposed in this paper is based on a geometrical analysis of kinematic uncertainty bounds. Finally, using the simulation results the effectiveness of the proposed methods is verified by illustrating the significant accuracy improvement in the obtained end effector positions. | 2017 | Conference | Parallel and Cable Robotics | |
| Motion Control of an Underactuated Parallel Robot with First Order Nonholonomic Constraint Mohammad Reza J. Harandi and Hamid. D. Taghirad 2017 5th RSI International Conference on Robotics and Mechatronics (ICRoM) | Abstract: Adding nonholonomic constraints in parallel manipulators, allows reduction of the actuated-joint number without affecting the reachable workspace. This principle applies to wrist robot in some underactuated designs. This paper studies steady state motion control for an nS-2SPU underactuated parallel wrist robot. First, a suitable Euler angles representation is selected and a new method for forward kinematic problem without extra sensor is proposed. Next, differential kinematics of the robot is analyzed considering first order nonholonomic constraint on angular velocity of the robot. By some manipulations, the derived equations are transformed into chain form, and a hierarchical sliding mode controller is designed for the system. Closed-loop performance of the proposed controller is compared to that of a traditional controller reported in the literature through simulations. | 2017 | Conference | Parallel and Cable Robotics | |
| Stability analysis and robust PID control of cable driven robots considering elasticity in cables MA Khosravi, Hamid D Taghirad AUT Journal of Electrical Engineering | Abstract: In this paper robust PID control of fully-constrained cable driven parallel manipulators with elastic cables is studied in detail. In dynamic analysis, it is assumed that the dominant dynamics of cable can be approximated by linear axial spring. To develop the idea of control for cable robots with elastic cables, a robust PID control for cable driven robots with ideal rigid cables is firstly designed and then, this controller is modified for the robots with elastic cables. To overcome vibrations caused by inevitable elasticity of cables, a composite control law is proposed based on singular perturbation theory. The proposed control algorithm includes robust PID control for corresponding rigid model and a corrective term. Using the proposed control algorithm the dynamics of the cable driven robot is divided into slow and fast subsystems. Then, based on the results of singular perturbation theory, stability analysis of the total system is performed. Finally, the effectiveness of the proposed control law is investigated through several simulations on a planar cable driven robot. | 2016 | Journal | Parallel and Cable Robotics | |
| Robust H∞ control of a 2RT parallel robot for eye surgery Abbas Bataleblu, Mohammad Motaharifar, Ebrahim Abedlu, Hamid D Taghirad 2016 4th international conference on robotics and mechatronics (ICROM) | Abstract: This paper aims at designing a robust controller for a 2RT parallel robot for eye telesurgery. It presents two robust controllers designs and their performance in presence of actuator saturation limits. The nonlinear model of the robot is encapsulated with a linear model and multiplicative uncertainty using linear fractional transformations (LFT). Two different robust control namely, H ∞ and μ-synthesis are used and implemented. Results reveal that the controllers are capable to stabilize the closed loop system and to reduce the tracking error in the presence of the actuators saturation. Simulation results are presented to show that effectiveness of the controllers compared to that of conventional controller designs. Furthermore, it is observed that μ-synthesis controller has superior robust performance. | 2016 | Journal | Parallel and Cable Robotics | |
| Stability Analysis and Robust PID Control of Cable-Driven Robots Considering Elasticity in Cables M. A. Khosravi, H. D. Taghirad AUT Journal of Electrical Engineering | Abstract: In this paper robust PID control of fully-constrained cable driven parallel manipulators with elastic cables is studied in detail. In dynamic analysis, it is assumed that the dominant dynamics of cable can be approximated by linear axial spring. To develop the idea of control for cable robots with elastic cables, a robust PID control for cable driven robots with ideal rigid cables is firstly designed and then, this controller is modified for the robots with elastic cables. To overcome vibrations caused by inevitable elasticity of cables, a composite control law is proposed based on singular perturbation theory. The proposed control algorithm includes robust PID control for corresponding rigid model and a corrective term. Using the proposed control algorithm the dynamics of the cable driven robot is divided into slow and fast subsystems. Then, based on the results of singular perturbation theory, stability analysis of the total system is performed. Finally, the effectiveness of the proposed control law is investigated through several simulations on a planar cable driven robot. | 2016 | Journal | Parallel and Cable Robotics | |
| Type Synthesis of 2R-T Parallel Mechanisms Based on the Screw Theory for Haptic Applicationsa Nahid Khajeh Ahmadi, Fateme Zarei and Hamid D.Taghirad 2016 4th International Conference on Robotics and Mechatronics (ICROM) | Abstract: Recently haptic devices are increasingly used in industry and research. As their applications become widespread, their design is needed to be more efficient. At design stage, determinant features of haptic devices such as rigidity, force bandwidth, accuracy etc. must be considered and improved. Structurally, parallel mechanisms (PMs) are appropriate candidates for haptic devices. Due to multi legged structure of PMs and their grounded motors, inertia and stiffness feautures of them are desirable and it also made them popular for applications that require high mechanical transparency. Spherical kinematics (two rotational and one translational motion, 2R-T) is a very common type of motion in haptic devices that is also capable of general rendering. In this paper, several 3-DOF 2R-T PMs are synthesized for haptic applications by means of the screw theory. All of these mechanisms have center of motion (CM) which is a key property in variety of applications such as surgery. These mechanisms are compared qualitatively and their applications as haptic devices are discussed. | 2016 | Conference | Parallel and Cable Robotics | |
| Adaptive robust control of fully constrained cable robots: singular perturbation approach Reza Babaghasabha, Mohammad A. Khosravi, Hamid D. Taghirad Nonlinear Dynamics | Abstract: In this paper, adaptive robust control of fully constrained cable-driven parallel robots with elastic cables is studied in detail. A composite controller is proposed for the system under the assumption of linear axial spring model as the dominant dynamics of the cables and in presence of model uncertainties. The proposed controller which is designed based on the singular perturbation theory, consists of two main parts. An adaptive robust controller is designed to counteract the unstructured and parametric uncertainties of the robot and a fast control term which is added to control the longitudinal vibrations of the cables. Moreover, to ensure that all cables remain in tension, the proposed control algorithm benefits from internal force concept. Using the results of the singular perturbation theory, the stability of the overall closed-loop system is analyzed through Lyapunov second method, and finally, the effectiveness of the proposed control algorithm is verified through some simulations on a planar cable-driven parallel robot. | 2016 | Journal | Parallel and Cable Robotics | |
| Optimization of KNTU Delta robot for pick and place application Amin Khorasani, Soheil Gholami, Hamid D. Taghirad 2015 3rd RSI International Conference on Robotics and Mechatronics (ICROM) | Abstract: In this paper, the desired configuration for installation of Delta robot is formulated as an optimization problem and has been solved to reach to the highest rate of pick and place operation. The optimization is performed considering the actuators speed and acceleration limitation of the robot within the workspace. Furthermore, energy consumption is considered next as the other optimization objective, and it is shown that the optimal region for the first optimization problem lies within that of the latter one, and therefore, there is no need to propose a multi-objective optimization problem in this case. As a proof of concept, KNTU Delta robot is designed and implemented in practice by using the optimal configuration, and it is observed that the optimal design is very promising in practice. | 2015 | Conference | Parallel and Cable Robotics | |
| Adaptive robust control of fully-constrained cable driven parallel robots Reza Babaghasabha, Mohammad A. Khosravi, Hamid D. Taghirad Mechatronics | Abstract: In this paper, adaptive robust control (ARC) of fully-constrained cable driven parallel robots is studied in detail. Since kinematic and dynamic models of the robot are partly structurally unknown in practice, in this paper an adaptive robust sliding mode controller is proposed based on the adaptation of the upper bound of the uncertainties. This approach does not require pre-knowledge of the uncertainties upper bounds and linear regression form of kinematic and dynamic models. Moreover, to ensure that all cables remain in tension, proposed control algorithm benefit the internal force concept in its structure. The proposed controller not only keeps all cables under tension for the whole workspace of the robot, it is chattering-free, computationally simple and it does not require measurement of the end-effector acceleration. The stability of the closed-loop system with proposed control algorithm is analyzed through Lyapunov second method and it is shown that the tracking error will remain uniformly ultimately bounded (UUB). Finally, the effectiveness of the proposed control algorithm is examined through some experiments on a planar cable driven parallel robot and it is shown that the proposed controller is able to provide suitable tracking performance in practice. | 2015 | Journal | Parallel and Cable Robotics | |
| Dynamic Analysis and Control of Fully-Constrained Cable Robots with Elastic Cables: Variable Stiffness Formulation Mohammad A. Khosravi and Hamid D. Taghirad Cable-Driven Parallel Robots | Abstract: In this paper dynamic analysis and control of fully-constrained parallel cable robots are studied in detail. In dynamic analysis, it is assumed that the dominant dynamics of cable can be approximated by linear axial spring. Furthermore, variable stiffness formulation for the cables is employed in modeling process. To overcome vibrations caused by inevitable elasticity of cables, a composite control law is proposed based on singular perturbation theory. Using the proposed control algorithm the dynamics of the cable robot is divided into two subsystems namely slow and fast. Then, based on the results of singular perturbation theory, stability analysis of the total system is performed. Finally, the effectiveness of the proposed composite control law is investigated through several simulations on a planar parallel cable robot. | 2014 | Journal | Parallel and Cable Robotics | |
| Adaptive Control of KNTU Planar Cable-Driven Parallel Robot with Uncertainties in Dynamic and Kinematic Parameters Reza Babaghasabha, Mohammad A. Khosravi and Hamid D. Taghirad Cable-Driven Parallel Robots | Abstract: This paper addresses the design and implementation of adaptive control on a planar cable-driven parallel robot with uncertainties in dynamic and kinematic parameters. To develop the idea, firstly, adaptation is performed on dynamic parameters and it is shown that the controller is stable despite the kinematic uncertainties. Then, internal force term is linearly separated into a regressor matrix in addition to a kinematic parameter vector that contains estimation error. In the next step to improve the controller performance, adaptation is performed on both the dynamic and kinematic parameters. It is shown that the performance of the proposed controller is improved by correction in the internal forces. The proposed controller not only keeps all cables in tension for the whole workspace of the robot, it is computationally simple and it does not require measurement of the end-effector acceleration as well. Finally, the effectiveness of the proposed control algorithm is examined through some experiments on KNTU planar cable-driven parallel robot and it is shown that the proposed control algorithm is able to provide suitable performance in practice. | 2014 | Journal | Parallel and Cable Robotics | |
| Online Time-Optimal Trajectory Planning in Dynamic Workspace of Cable Suspended Robots Ahmad Sharifi and Hamid D. Taghirad 2014 Second RSI/ISM International Conference on Robotics and Mechatronics (ICRoM) | Abstract: This paper presents a method for online trajectory planning of cable suspended robots. A three degrees-of-freedom spatial cable robot is studied in this analysis. By deriving dynamic model of the robot, cable force restrictions will induce a set of algebraic inequalities in dynamic equations. Direction of required tracking acceleration reveals feasible motion of the robot, which guarantees non-violation of cable force bilateral bounds. Required tracking acceleration is in the direction of instantaneous minus desired velocity vectors with specified magnitude. Furthermore, alternative recipes are employed to decrease negative impacts of unwanted inputs and applying actuator constraints in trajectory planning. Finally, several simulations are presented to demonstrate success of the method. Proposed approach can be used in online trajectory tracking for all cable-driven parallel suspended robots akin to what is realized for the presented three degrees-of-freedom robot. | 2014 | Conference | Parallel and Cable Robotics | |
| Closed-Form Dynamic Formulation of Spherical Parallel Manipulators by Gibbs-Appell Method Ebrahim Abedloo, Amir Molaei and Hamid D. Taghirad 2014 Second RSI/ISM International Conference on Robotics and Mechatronics (ICRoM) | Abstract: Spherical Parallel Robot (SPR) is a complex but widely used type of manipulators that performs only rotational motion. Dynamic analysis of SPR has a vital role in mechanical design, model-based controller, identification and fault detection of such robots. Complexity of SPR kinematic structure makes traditional dynamic modeling methods such as Newton-Euler, virtual work and Lagrange formulations a prohibitive task. In this paper a new procedure for deriving closed form dynamics of general SPR using Gibbs-Appell method is presented. The proposed method does not require any recursive computation or symbolic manipulation and dynamic matrices of the robot is directly derived in an explicit form. By using the proposed method, closed form dynamic formulation of a general 3DOF SPR, known as agile wrist, is obtained and it is verified for an arbitrary trajectory. The unique feature of the method presented in this paper, makes it promising to be used for other parallel manipulators. | 2014 | Conference | Parallel and Cable Robotics | |
| Implementation of Analytic Iterative Redundancy Resolution Technique on KNTU Cable Robot Fereshteh Sabahi, Mohammad A. Khosravi and Hamid D. Taghirad 2014 Second RSI/ISM International Conference on Robotics and Mechatronics (ICRoM) | Abstract: Analytic Iterative Redundancy Resolution (AIRR) is a semi-analytic method for redundancy resolution in cable-driven manipulators. As all previous redundancy resolution methods were based on numerical algorithms, they impose an uncertainty to execution time which is barely acceptable in realtime implementation. In this paper, AIRR is implemented as a fast solution to redundancy resolution problem by checking a set of analytic solutions instead of using numerical algorithms. Furthermore, the performance of this method is compared to previous numerical method implemented on KNTU robot with respect to execution time and accuracy. It is shown that the realtime performance of this implementation in closed-loop control structure is at least fifteen times faster than that of previously implemented methods. Such decrease in execution time in realtime implementation is very promising for future applications. | 2014 | Conference | Parallel and Cable Robotics | |
| Dynamic Modeling and Control of Parallel Robots With Elastic Cables: Singular Perturbation Approach Mohammad A. Khosravi and Hamid D. Taghirad IEEE Transactions on Robotics | Abstract: In this paper, control of fully-constrained parallel cable robots with elastic cables is studied in detail. In the modeling process, longitudinal vibration of cables is considered as their dominant dynamics, and the governing equations of motion are rewritten to the standard form of singular perturbation. The proposed composite controller consists of two main components. A rigid controller is designed based on the slow or rigid model of the system and a corrective term is added to guarantee asymptotic stability of the fast dynamics. Then, by using Tikhonov theorem, slow and fast variables are separated and incorporated into the stability analysis of the overall closed-loop system, and a set of sufficient conditions for the stability of the total system is derived. Finally, the effectiveness of the proposed control law is verified through simulations. | 2014 | Journal | Parallel and Cable Robotics | |
| Robust PID control of fully-constrained cable driven parallel robots Mohammad A. Khosravi, Hamid D. Taghirad Mechatronics | Abstract: In this paper dynamic analysis and robust PID control of fully-constrained cable driven parallel manipulators are studied in detail. Since in this class of manipulators cables should remain in tension for all maneuvers in their workspace, feedback control of such robots becomes more challenging than that of conventional parallel robots. In this paper, structured and unstructured uncertainties in dynamics of the robot are considered and a robust PID controller is proposed for the cable robot. To ensure that all cables remain in tension internal force concept is used in the proposed PID control algorithm. Then, robust stability of the closed-loop system with proposed control algorithm is analyzed through Lyapunov direct method and it is shown that by suitable selection of the PID controller gains, the closed-loop system would be robustly stable. Finally, the effectiveness of the proposed PID algorithm is examined through experiments on a planar cable driven robot and it is shown that the proposed control structure is able to provide suitable performance in practice. | 2014 | Journal | Parallel and Cable Robotics | |
| Dynamic Modeling and Control of Parallel Robots With Elastic Cables: Singular Perturbation Approach Mohammad A. Khosravi, Member and Hamid D. Taghirad IEEE Transactions on Robotics | Abstract: In this paper, control of fully-constrained parallel cable robots with elastic cables is studied in detail. In the modeling process, longitudinal vibration of cables is considered as their dominant dynamics, and the governing equations of motion are rewritten to the standard form of singular perturbation. The proposed composite controller consists of two main components. A rigid controller is designed based on the slow or rigid model of the system and a corrective term is added to guarantee asymptotic stability of the fast dynamics. Then, by using Tikhonov theorem, slow and fast variables are separated and incorporated into the stability analysis of the overall closed-loop system, and a set of sufficient conditions for the stability of the total system is derived. Finally, the effectiveness of the proposed control law is verified through simulations. | 2014 | Journal | Parallel and Cable Robotics | |
| Kinematic Performance Indices Analyzed on Four Planar Cable Robots via Internal Analysis S. A. Khalipour, A. Zarif Loloei, M. Tale Masouleh and H. D. Taghirad Robotics and Mechatronics | Abstract: In this paper, some new kinematic performance indices are proposed and examined on four planar cable driven parallel manipulators. The main kinematic indices are based on kinematic sensitivity and controllable workspace of the robot. Interval analysis is adopted as a mathematical framework to compute feasible kinematic sensitivity and worst kinematic sensitivity indices. For determining the feasible kinematic sensitivity, the controllable workspace is combined with the desired kinematic sensitivity property. The area of the foregoing region and the worst kinematic sensitivity corresponding to it are introduced as practical design indices. Then four typical design of planar cable robot are examined by the following performance measures, and one of such designs are selected and implemented in practice. | 2013 | Conference | Parallel and Cable Robotics | |
| Robust PID Control of Cable Driven Robots with Elastic Cables Mohammad A. Khosravi and Hamid D. Taghirad 2013 First RSI/ISM International Conference on Robotics and Mechatronics (ICRoM) | Abstract: In this paper robust PID control of fully-constrained cable-driven robots with elastic cables is studied in detail. To develop the idea, a robust PID control for cable-driven robots with ideal rigid cables is firstly designed and then, this controller is extended for the robots with elastic cables. To overcome vibrations caused by inevitable elasticity of cables, a composite control law is proposed based on singular perturbation theory. The proposed control algorithm includes robust PID control for corresponding rigid model and a corrective term. Using the proposed control algorithm the dynamics of the cable-driven robot is divided into slow and fast subsystems. Then, based on the results of singular perturbation theory, stability analysis of the total system is performed. Finally, the effectiveness of the proposed control law is investigated through several simulations on a planar cable-driven robot. | 2013 | Conference | Parallel and Cable Robotics | |
| A Positive Tensions PID Controller for a Planar Cable Robot: An Experimental Study Mohammad A. Khosravi, Hamid D. Taghirad and Reza Oftadeh 2013 First RSI/ISM International Conference on Robotics and Mechatronics (ICRoM) | Abstract: In this paper design and control of planar cable-driven parallel robots are studied in an experimental prospective. Since in this class of manipulators, cable tensionability conditions must be met, feedback control of such robots becomes more challenging than for conventional robots. To meet these conditions, internal force control structure is introduced and used in addition to a PID control scheme to ensure that all cables remain in tension. A robust PID controller is proposed for partial knowledge of the robot, to keep the tracking errors bounded. Finally, the effectiveness of the proposed control algorithm is examined through experiments on K.N. Toosi planar cable-driven robot and it is shown that the proposed control structure is able to provide suitable performance in practice. | 2013 | Conference | Parallel and Cable Robotics | |
| Kinematic Performance Indices Analyzed on Four Planar Cable Robots via Interval Analysis S. A. Khalilpour, A. Zarif Loloei, M. Tale Masouleh and H. D. Taghirad 2013 First RSI/ISM International Conference on Robotics and Mechatronics (ICRoM) | Abstract: In this paper, some new kinematic performance indices are proposed and examined on four planar cable driven parallel manipulators. The main kinematic indices are based on kinematic sensitivity and controllable workspace of the robot. Interval analysis is adopted as a mathematical framework to compute feasible kinematic sensitivity and worst kinematic sensitivity indices. For determining the feasible kinematic sensitivity, the controllable workspace is combined with the desired kinematic sensitivity property. The area of the foregoing region and the worst kinematic sensitivity corresponding to it are introduced as practical design indices. Then four typical design of planar cable robot are examined by the following performance measures, and one of such designs are selected and implemented in practice. | 2013 | Conference | Parallel and Cable Robotics | |
| Feasible Kinematic Sensitivity in Cable Robots Based on Interval Analysis S. A. Khalilpour, A. Zarif Loloei, H. D. Taghirad, and M. Tale Masouleh Cable-Driven Parallel Robots | Abstract: The kinematic sensitivity has been recently proposed as a unit-consistent performance index to circumvent several shortcomings of some notorious indices such as dexterity. This paper presents a systematic interval approach for computing an index by which two important kinematic properties, namely feasible workspace and kinematic sensitivity, are blended into each other. The proposed index may be used to efficiently design different parallel mechanisms, and cable driven robots. By this measure, and for parallel manipulators, it is possible to visualize constant orientation workspace of the mechanism where the kinematic sensitivity is less than a desired value considered by the designer. For cable driven redundant robots, the controllable workspace is combined with the desired kinematic sensitivity property, to determine the so-called feasible kinematic sensitivity workspace of the robot. Three case studies are considered for the development of the idea and verification of the results, through which a conventional planar parallel manipulator, a redundant one and a cable driven robot is examined in detail. Finally, the paper provides some hints for the optimum design of the mechanisms under study by introducing the concept of minimum feasible kinematic sensitivity covering the whole workspace. | 2012 | Journal | Parallel and Cable Robotics | |
| Experimental Performance of Robust PID Controller on a Planar Cable Robot M. A. Khosravi and H. D. Taghirad Cable-Driven Parallel Robots | Abstract: In this paper dynamic analysis and experimental performance of robust PID control for fully-constrained cable driven robots are studied in detail. Since in this class of manipulators cables should remain in tension for all maneuvers through their whole workspace, feedback control of such robots becomes more challenging than conventional parallel robots. To ensure that all the cables remain in tension, a corrective term is used in the proposed PID control scheme. In design of PID control it is assumed that there exist bounded norm uncertainties in Jacobian matrix and in all dynamics matrices. Then a robust PID controller is proposed to overcome partial knowledge of robot, and to guarantee boundedness of tracking errors. Finally, the effectiveness of the proposed PID algorithm is examined through experiments and it is shown that the proposed control structure is able to provide suitable performance in practice. | 2012 | Journal | Parallel and Cable Robotics | |
| Monte Carlo Sampling of Non-Gaussian Proposal Distribution in Feature-Based RBPF-SLAM Nina Marhamati, Hamid D. Taghirad, Kasra Khosoussi | Abstract: Particle lters are widely used in mobile robot localization and mapping. It is well-known that choosing an appropriate proposal distribution plays a crucial role in the success of particle lters. The proposal distribution conditioned on the most recent observation, known as the optimal proposal distribution (OPD), increases the number of eective particles and limits the degeneracy of lter. Conventionally, the OPD is approximated by a Gaussian distribution, which can lead to failure if the true distribution is highly non-Gaussian. In this paper we propose two novel solutions to the problem of feature-based SLAM, through Monte Carlo approximation of the OPD which show superior results in terms of mean squared error (MSE) and number of eective samples. The proposed methods are capable of describing non-Gaussian OPD and dealing with nonlinear models. Simulation and experimental results in large-scale environments show that the new algorithms outperform the aforementioned conventional methods. | 2012 | Conference | Parallel and Cable Robotics | |
| Controllable Workspace of Cable-Driven Redundant Parallel Manipulators by Fundamental Wrench Analysis Azadeh Zarif Loloei, Hamid D. Taghirad Transactions- Canadian Society for Mechanical Engineering | Abstract: Workspace analysis is always a crucial issue in robotic manipulator design. This paper introduces a set of newly defined fundamental wrenches that opens new horizons to physical interpretation of controllable workspace of a general cable-driven redundant parallel manipulator. Based on this set of fundamental wrenches, a novel tool is presented to determine configurations of cable-driven redundant parallel manipulator that belong to the controllable workspace. Analytical expressions of such workspace boundaries are obtained in an implicit form and a rigorous mathematical proof is provided for this method. Finally, the proposed method is implemented on a spatial cable-driven manipulator of interest. | 2012 | Journal | Parallel and Cable Robotics | |
| Dexterous Workspace Optimization of a Tricept Parallel Manipulator Mir Amin Hosseini, Hamid-Reza M. Daniali, and Hamid D. Taghirad Advanced Robotics | Abstract: The growing interest in the use of parallel manipulators in machining applications requires clear determination of the workspace and dexterity. In this paper, the workspace optimization of a Tricept parallel manipulator under joint constraints is performed. This parallel manipulator has complex degrees of freedom and, therefore, leads to dimensionally inhomogeneous Jacobian matrices. Here, we divide the Jacobian entries by units of length, thereby producing a new Jacobian that is dimensionally homogeneous. By multiplying the associated entries of the twist array to the same length, we made this array homogeneous as well. The workspace of the manipulator is parameterized using several design parameters and is optimized using a genetic algorithm. For the workspace of the manipulator, local conditioning indices and minimum singular values are calculated. For the optimal design, it is shown that by introducing the local conditioning indices and minimum singular values, the quality of the parallel manipulator is improved at the cost of workspace reduction. | 2011 | Journal | Parallel and Cable Robotics | |
| Controllable Workspace of General Cable Driven Redundant Parallel Manipulator Based on Fundamental Wrench A. Zarif Loloei, H. D. Taghirad Transactions- Canadian Society for Mechanical Engineering | Abstract: Workspace analysis is one of the most important issues in robotic manipulator design. This paper introduces a set of newly defined fundamental wrenches that opens new horizons for physical interpretation of controllable workspace of cable driven redundant parallel manipulators. Moreover, an analytical method is proposed to specify the controllable workspace of general redundant cabledriven parallel manipulators based on this set of fundamental wrenches. In the proposed method, an analytic approach based on linear algebra is employed to derive the boundary of controllable workspace. Finally, the proposed method is illustrated through spatial example. | 2011 | Conference | Parallel and Cable Robotics | |
| Dynamic Analysis and Control of Cable Driven Robots Considering Elasticity in Cables Mohammad A. Khosravi, Hamid. D. Taghirad Transactions- Canadian Society for Mechanical Engineering | Abstract: In this paper modeling and control of cable driven redundant parallel manipulators with flexible cables, are studied in detail. Based on new results, in fully constrained cable robots, cables can be modeled as axial linear springs. Considering this assumption the system dynamics formulation is developed using Lagrange approach. Since in this class of robots, all the cables should remain in tension for the whole workspace, the notion of internal forces are introduced and incorporated in the proposed control algorithm. The control algorithm is developed in cable coordinates in which the internal forces play an important role. Finally, asymptotic stability of the closed loop system is analyzed through Lyapunov theorem, and the performance of the proposed algorithm is studied by simulations. | 2011 | Conference | Parallel and Cable Robotics | |
| Dynamic Aalysis and Control of Cable Driven Robots With Elastic Cables Mohammad A. Khosravi, Hamid D. Taghirad Transactions- Canadian Society for Mechanical Engineering | Abstract: In this paper modeling and control of cable driven redundant parallel manipulators with flexible cables, are studied in detail. Based on new results, in fully constrained cable robots, cables can be modeled as axial linear springs. Considering this assumption the system dynamics formulation is developed using Lagrange approach. Since in this class of robots, all the cables should remain in tension for the whole workspace, the notion of internal forces are introduced and incorporated in the proposed control algorithm. The control algorithm is developed in cable coordinates in which the internal forces play an important role. Finally, asymptotic stability of the closed loop system is analyzed through Lyapunov theorem, and the performance of the proposed algorithm is studied by simulations | 2011 | Conference | Parallel and Cable Robotics | |
| Lagrangian Dynamics of Cable-Driven Parallel Manipulators: A Variable Mass Formulation Yousef B. Bedoustani, Pascal Bigras, Hamid D. Taghirad, Ilian A. Bonev Transactions- Canadian Society for Mechanical Engineering | Abstract: In this paper, dynamic analysis of cable-driven parallel manipulators (CDPMs) is performed using the Lagrangian variable mass formulation. This formulation is used to treat the effect of a mass stream entering into the system caused by elongation of the cables. In this way, a complete dynamic model of the system is derived, while preserving the compact and tractable closed-form dynamics formulation. First, a general formulation for a CDPM is given, and the effect of change of mass in the cables is integrated into its dynamics. The significance of such a treatment is that a complete analysis of the dynamics of the system is achieved, including vibrations, stability, and any robust control synthesis of the manipulator. The formulation obtained is applied to a typical planar CDPM. Through numerical simulations, the validity and integrity of the formulations are verified, and the significance of the variable mass treatment in the analysis is examined. For this example, it is shown that the effect of introducing a mass stream into the system is not negligible. Moreover, it is non linear and strongly dependent on the geometric and inertial parameters of the robot, as well as the maneuvering trajectory. | 2011 | Conference | Parallel and Cable Robotics | |
| Geometric Analysis of the Kinematic Sensitivity of Planar Parallel Mechanisms Mohammad Hossein Saadatzi, Mehdi Tale Masouleh, Hamid D. Taghirad, Cle´ment Gosselin, Philippe Cardou Transactions- Canadian Society for Mechanical Engineering | Abstract: The kinematic sensitivity is a unit-consistent measure that has been recently proposed as a mechanism performance index to compare robot architectures. This paper presents a robust geometric approach for computing this index for the case of planar parallel mechanisms. The physical meaning of the kinematic sensitivity is investigated through different combinations of the Euclidean and infinity norms and by means of several illustrative examples. Finally, this paper opens some avenues to the dimensional synthesis of parallel mechanisms by exploring the meaning of the global kinematic sensitivity index. | 2011 | Journal | Parallel and Cable Robotics | |
| On the Optimum Design of 3-RPR Parallel Mechanisms Mohammad Hossein Saadatzi, Mehdi Tale Masouleh, Hamid D. Taghirad, Clement ´ Gosselin and Philippe Cardou 2011 19th Iranian Conference on Electrical Engineering | Abstract: This paper deals with the optimization of 3-RPR planar parallel mechanisms based on different performance indices including the kinematic sensitivity, the workspace and the singularity locus. Since the kinematic sensitivity has been proposed only recently, more emphasis is placed on how it should be adapted for the optimization of 3-RPR parallel mechanisms. The optimization is implemented in sequence using first a single objective technique, differential evolution, and then resorting to a multi-objective optimization concept, the so-called Non-dominated sorting genetic algorithm-II. A Pareto-based multi-objective approach helps to overcome the problem of unit-inconsistent objectives in the optimization algorithm. Moreover, an Infinity-norm is used in computation of the kinematic sensitivity which has perhaps the clearest physical interpretation. | 2011 | Conference | Parallel and Cable Robotics | |
| Modelling and Control of Fully Constrained Cable Driven Robots with Flexible Cables Mohammad A. Khosravi, and Hamid D. Taghirad The 2nd International Conference on Control, Instrumentation and Automation | Abstract: In this paper modelling and control of cable-driven redundant parallel manipulators (CDRPM) with flexible cables are studied in detail. In this type of manipulators the cables should remain in tension in the whole workspace. New research results have shown that in fully constrained CDRPM cable can be modelled as an axial spring. Based on this fact a new model of this type of robot is studied. Furthermore, internal forces are introduced and incorporated in the proposed control algorithm. This control algorithm is formed in cable length coordinates in which the internal forces play an important role. Finally, the closed loop system is proved to be stable, through Lyapunov analysis, and the performance of the proposed algorithm is studied through simulation. | 2011 | Conference | Parallel and Cable Robotics | |
| Modeling and Control of Cable Driven Parallel Manipulators with Elastic Cables: Singular Perturbation Theory Alaleh Vafaei, Mohammad A. Khosravi, and Hamid D. Taghirad ICIRA 2011: Intelligent Robotics and Applications | Abstract: This paper presents a new approach to the modeling and control of cable driven parallel manipulators and particularly KNTU CDRPM. First, dynamical model of the cable driven parallel manipulator is derived considering the elasticity of the cables, and then this model is rewritten in the standard form of singular perturbation theory. This theory used here as an effective tool for modeling the cable driven manipulators. Next, the integrated controller, applied for control of the rigid model of KNTU CDRPM in previous researches, is improved and a composite controller is designed for the elastic model of the robot. Asymptotic stability analysis of the proposed rigid controller is studied in detail. Finally, a simulation study performed on the KNTU CDRPM verifies the closed-loop performance compared to the rigid model controller. | 2011 | Conference | Parallel and Cable Robotics | |
| Multi-Objective Scale Independent Optimization of 3-RPR Parallel Mechanisms M. H. Saadatzi, M. Tale Masouleh, H. D. Taghirad, C. Gosselin, M. Teshnehlab World Congress in Mechanism and Machine Science | Abstract: This paper deals with the optimization of 3-RPR planar parallel mechanisms based on different per-formance indices including kinematic sensitivity, stiffness, workspace and singularity. The optimization is imple-mented in sequence using first a single objective tech-nique, differential evolution, and then resorting to a multi-objective optimization concept, the so-called nondomi-nated sorting genetic algorithm-II. The results revealed that the optimality of the mechanism under study is scale-independent for the considered optimization objectives. Moreover, based on the scale invariance property of the main objectives, it follows that different kinetoestatic ob-jective functions must be scale invariant. The relations for the kinetoestatic objective expressions as functions of mech-anism scale are derived and to circumvent the problem of unit inconsistency the rotational and translational parts of these objectives are considered separately. To overcome the problem of inconsistent objectives in optimization al-gorithm, a Pareto-based multi-objective approach is used which preserves the scale invariance property. | 2011 | Conference | Parallel and Cable Robotics | |
| Workspace analysis of 5-PRUR parallel mechanisms (3T2R) Mohammad Hossein Saadatzi, Mehdi Tale Masouleh, Hamid D. Taghirad Robotics and Computer-Integrated Manufacturing | Abstract: This paper investigates the constant-orientation workspace of five-degree-of-freedom parallel mechanisms generating the three translations and two independent rotations and comprising five identical limbs of the type. The general mechanism was proposed recently from the type synthesis performed for 5-DOF parallel mechanisms with identical limb structures. In this study, the emphasis is placed on the determination of the constant-orientation workspace using a geometric interpretation of the so-called vertex space, i.e., the motion generated by a limb for a given orientation. The geometric investigation is carried out using geometric constructive approach, which is implemented in a computer algebra system and in a CAD system. This paper shows that these two approaches are complementary tools to investigate the workspace of parallel mechanisms. The geometric constructive approach proposed in this paper bring insight into the architecture optimization and it can be regarded as a guideline for the workspace analysis of parallel mechanisms whose vertex spaces generate Bohemian dome. | 2011 | Journal | Parallel and Cable Robotics | |
| An Analytic-Iterative Redundancy Resolution Scheme for Cable-Driven Redundant Parallel Manipulators Hamid D. Taghirad and Yousef B. Bedoustani IEEE Transactions on Robotics | Abstract: In this paper, redundancy resolution of a cable-driven parallel manipulator is performed through an analytic-iterative scheme. The redundancy resolution scheme is formulated as a convex optimization problem with inequality constraints that are imposed by manipulator structure and cable dynamics. The Karush-Kuhn-Tucker theorem is used to analyze the optimization problem and to draw an analytic-iterative solution for it. Subsequently, a tractable and iterative search algorithm is proposed to implement the redundancy resolution of such redundant manipulators. Furthermore, it is shown through simulations that the worst case and average elapsed time that is required to implement the proposed redundancy resolution scheme in a closed-loop implementation is considerably less than that of other numerical optimization methods. | 2011 | Journal | Parallel and Cable Robotics | |
| Iterative-Analytic Redundancy Resolution Scheme for A Cable-Driven Redundant Parallel Manipulator Yousef B. Bedoustani, and Hamid D. Taghirad 2010 IEEE/ASME International Conference on Advanced Intelligent Mechatronics | Abstract: In this paper, redundancy resolution of a cable-driven parallel manipulator is solved by an iterative-analytic scheme. The method can be applied to all kind of redundant manipulators either parallel or serial with constraint caused through their dynamics. However, for sake of simulation the proposed method is implemented on a cable-driven redundant parallel manipulator (CDRPM). The redundancy resolution problem is formulated as a convex optimization with equality and non-equality constraints caused by manipulator structure and cables dynamics. Karush-Kuhn-Tucker theorem is used to analyze the optimization problem and to find an analytic solution. Subsequently, a tractable and iterative search algorithm is proposed to solve the redundancy resolution of such redundant mechanisms. Furthermore, it is shown through the simulation that, the elapsed time required to implement the analytical redundancy resolution scheme in a closed-loop structure is considerably less than that of other numerical optimization methods. | 2010 | Conference | Parallel and Cable Robotics | |
| A Geometric Costructive Approach For The Workspace Analysis of Symmetrical 5-PRUR Parallel Mechanisms (3T2R) Mehdi Tale Masouleh, Mohammad Hossein Saadatzi, Clement Gosselin, Hamid D. Taghirad Proceedings of the ASME Design Engineering Technical Conference | Abstract: This paper investigates an important kinematic property, the constant-orientation workspace, of five-degree-of-freedom parallel mechanisms generating the 3T2R motion and comprising five identical limbs of the P RUR type. The general mechanism originates from the type synthesis performed for symmetrical 5-DOF parallel mechanism. In this study, the emphasis is placed on the determination of constant-orientation workspace using geometrical interpretation of the so-called vertex space, i.e., motion generated by a limb for a given orientation, rather than relying on classical recipes, such as discretization methods. For the sake of better understanding a CAD model is also provided for the vertex space. The constructive geometric approach presented in this paper provides some insight into the architecture optimization. Moreover, this approach facilitates the computation of the evolution of the volume of the constant-orientation workspace for different orientations of the end-effector. | 2010 | Conference | Parallel and Cable Robotics | |
| Forward Kinematic Problem and Constant Orientation Workspace of 5-RPRRR (3T2R) Parallel Mechanisms Mehdi Tale Masouleh, Clément Gosselin, Mohammad Hossein Saadatzi, Hamid D. Taghirad Electrical Engineering (ICEE), 2010 18th Iranian Conference on | Abstract: This paper investigates some kinematic properties of a five-degree-of-freedom parallel mechanism generating the 3T2R motion and comprising five identical limbs of the RP?UR type. In this study, two classes of simplified designs are proposed whose forward kinematic problems have either a univariate or a closed-form solution. The principal contributions of this study are the solution of the forward kinematic problem for some simplified designswhich may have more solutions than the FKP of the general 6-DOF Stewart platform with 40 solutionsand the determination of the constant orientation workspace based on algebraic geometry (Bohemian domes). | 2010 | Conference | Parallel and Cable Robotics | |
| Integrated Controller For An OverConstrained Cable Driven Parallel Manipulator: KNTU CDRPM Alaleh Vafaei, Mohammad M. Aref and Hamid D. Taghirad 2010 IEEE International Conference on Robotics and Automation | Abstract: This paper presents an approach to the control of the KNTU CDRPM using an integrated control scheme. The goal in this approach is achieving accurate trajectory tracking while assuring positive tension in the cables. By the proposed controller, the inherent nonlinear behavior of the cable and the target tracking errors are simultaneously compensated. In this paper asymptotic stability analysis of the close loop system is studied in detail. Moreover, it is shown that the integrated control strategy reduces the tracking error by 80% compared to that of a single loop controller in the considered manipulator. The closed-loop performance of the control topology is analyzed by a simulation study that is performed on the manipulator. The simulation study verifies that the proposed controller is not only promising to be implemented on the KNTU CDRPM, but also being suitable for other cable driven manipulators. | 2010 | Conference | Parallel and Cable Robotics | |
| Forward Kinematic Analysis of A Planar Cable Driven Redundant Parallel Manipulator Using Force Sensors Reza Oftadeh, Mohammad M. Aref, and Hamid D. Taghirad IEEE/RSJ International Conference on Intelligent Robots and Systems | Abstract: Newly developed cable driven redundant parallel manipulators (CDRPM) have numerous advantages compared to that of the conventional parallel mechanisms. However, there exist some challenging issues in over-constrained mechanisms like CDRPMs. In contrast to serial manipulators, complexity of parallel manipulator forward kinematics (FK) is one of the main issues being under study in the control of such manipulators. Moreover, using extra sensory data is a common approach in the FK solution of rigid-linked parallel manipulators, which is considered by fewer researchers for CDRPMs. In this paper, tension force sensors of the cables are used as an extra sensor to simplify analytical solution of the FK for a planar CDRPM. To find a suitable solution, geometrical and physical characteristics of the robot are analyzed. It is shown that the proposed method provides the required accuracy and significantly improves the process time compared to the conventional methods. | 2010 | Conference | Parallel and Cable Robotics | |
| Explicit Dynamics Formulation of StewartGough Platform: A NewtonEuler Approach Reza Oftadeh, Mohammad M. Aref and Hamid D. Taghirad IEEE/RSJ International Conference on Intelligent Robots and Systems | Abstract: Dynamic analysis of parallel manipulators plays a vital role in the design and control of such manipulators. Closed-chain kinematic structure affects the dynamics formulations by several constraints. Therefore, especially for higher degrees of freedom manipulators, manipulation of implicit and bulky dynamics formulation looses the tractability of the analysis. In this paper, a methodology and some simplification tools are introduced to achieve explicit dynamics formulation for parallel manipulators. This methodology is applied for the dynamics analysis of the most celebrated parallel manipulator, namely Stewart-Gough platform. By avoiding any recursive or component-wise derivations, the resulting dynamics formulation provides more insight for designers, and can be much easier used in any model-based control of such manipulators. In order to verify the resulting dynamics equations, Lagrange method is used to derive and compare the manipulator mass matrix. This methodology can be further used to formulate the explicit dynamics of other parallel manipulators.Dynamic analysis of parallel manipulators plays a vital role in the design and control of such manipulators. Closed-chain kinematic structure affects the dynamics formulations by several constraints. Therefore, especially for higher degrees of freedom manipulators, manipulation of implicit and bulky dynamics formulation looses the tractability of the analysis. In this paper, a methodology and some simplification tools are introduced to achieve explicit dynamics formulation for parallel manipulators. This methodology is applied for the dynamics analysis of the most celebrated parallel manipulator, namely Stewart-Gough platform. By avoiding any recursive or component-wise derivations, the resulting dynamics formulation provides more insight for designers, and can be much easier used in any model-based control of such manipulators. In order to verify the resulting dynamics equations, Lagrange method is used to derive and compare the manipulator mass matrix. This methodology can be further used to formulate the explicit dynamics of other parallel manipulators. | 2010 | Conference | Parallel and Cable Robotics | |
| Kinematic analysis of 5-RPUR (3T2R) parallel mechanisms Mehdi Tale Masouleh, Clément Gosselin, Mohammad Hossein Saadatzi, Xianwen Kong, Hamid D. Taghirad Parallel Manipulators | Abstract: This paper investigates some kinematic properties of a five-degree-of-freedom parallel mechanism generating the 3T2R motion and comprising five identical limbs of the RPUR type. The general mechanism originates from the type synthesis performed for symmetrical 5-DOF parallel mechanism. In this study, two classes of simplified designs are proposed whose forward kinematic problem have either a univariate or a closed-form solution. The principal contributions of this study are the solution of the forward kinematic problem for some simplified designswhich may have more solutions than the FKP of the general 6-DOF Stewart platform with 40 solutionsand the determination of the constant-orientation workspace which is based on the topology of the vertex space (Bohemian dome) and a geometric constructive approach. | 2010 | Journal | Parallel and Cable Robotics | |
| Wrench Feasible Workspace Analysis of Cable-Driven Parallel Manipulators Using LMI Approach Azadeh Zarif Loloei, Mohamad M. Aref, and Hamid D. Taghirad Advanced Intelligent Mechatronics | Abstract: Workspace analysis is one of the most important issues in robotic manipulator design. This paper introduces a systematic method of analysis the wrench feasible workspace for general redundant cable-driven parallel manipulators. In this method, wrench feasible workspace is formulated in term of linear matrix inequalities and projective method is used for solving them. This method is one of the most efficient interior-point methods with a polynomial-time complexity. Moreover, the notion of dexterous workspace is defined, which can be determined for redundant cable driven manipulators exerting a worst case external wrench at the end effector. A detailed case study of the wrench feasible workspace and dexterous workspace determination are included for a six DOF, eight actuated cable-driven redundant parallel manipulator. | 2009 | Conference | Parallel and Cable Robotics | |
| Kinematics and Jacobian Analysis of the KNTU CDRPM: A Cable Driven Redundant Parallel Manipulator Mohammad M. Aref, Reza Oftadeh and Hamid D. Taghirad Iranian Conference on Electrical Engineering, ICEE | Abstract: KNTU CDRPM is a cable driven redundant parallel manipulator, which is under investigation for possible implementation in large workspace applications. This type newly developed manipulator has numerous advantages compared to that of the conventional parable mechanisms. The rotational motion range is relatively large, the inherent redundancy improves dexterity of the manipulator, and the light weight structure makes the robot more energy efficient and significantly fast. However, there exist some challenging issues in the over-constrained mechanism like KNTU CDRPM. Collision avoidance, force feasibility, and linear independency of the cables are the main issues being under study in the design of such manipulators. In this paper, singularity of the KNTU CDRPM is studied in detail. To extract kinematic properties of the robot, the inverse and forward kinematics are analyzed. It is shown that singularity analysis can well describe the characteristics of the design and provide the sufficient means to the designer to improve these characteristics. Finally, a suitable design strategy is proposed to significantly reduce the singularity of the manipulator within its whole workspace. The outcomes of this strategy implemented on KNTU CDRPM result in a significant improvement of the singular free workspace of the proposed design compared to that of the latest parallel manipulators. | 2009 | Conference | Parallel and Cable Robotics | |
| Adaptive Cascade Control of the KNTU CDRPM: A Cable Driven Redundant Parallel Manipulator Pooneh Gholami, Mohammad M. Aref and Hamid D. Taghirad Intelligent Robots and Systems, 2008. IROS | Abstract: The challenging control problem of the cable driven redundant manipulators is due to the complexity of its dynamic and the required stringent performance for the its promising applications. This paper presents an approach to the control of the KNTU CDRPM using an adaptive cascade control scheme. The goal in this approach is achieving accurate trajectory tracking while assuring positive tension in the cables. The cascade control topology uses two loops, namely the internal and external loops. The inherent nonlinear behavior of the cable manipulator is controlled by the internal loop, while the external loop can effectively reduce the target tracking errors of the end-effector in the presence of disturbance force/torques. The cascade strategy reduces the tracking error by 80% compared to that of a single loop controller in the KNTU CDRPM. Moreover, adaptation of the cascade controller gains can significantly improve the overall tracking performance. The closed-loop performance of various control topologies are analyzed by a simulation study that is performed on the KNTU CDRPM. Since, the dynamic equations of this parallel manipulator is implicit in its general form, special integration routines are used for integration. The simulation study verifies that the proposed controller is not only promising to be implemented on the KNTU CDRPM, but also being suitable for other cable driven manipulators. | 2009 | Conference | Parallel and Cable Robotics | |
| Optimal Design of Dexterous Cable Driven Parallel Manipulators Mohammad M. Aref, Hamid D. Taghirad and Sasan Barissi International Journal of Robotics | Abstract: Optimal design of parallel manipulators is known as a challenging problem especially for cable driven robots. In this paper, optimal design of cable driven redundant parallel manipulators (CDRPM) is studied in detail. Visual Inspection method is proposed as a systematic design process of the manipulator. A brief review of various design criteria shows that the optimal design of a CDRPM cannot be performed based on single objective. Therefore, a multi objective optimal design problem is formulated in this paper through an overall cost function. Furthermore, a proper weighting selection for the overall cost function is proposed, which can be viewed as a promising method to the open problem of parallel manipulator design. In order to verify the effectiveness of the proposed method, it is applied on the design of KNTU CDRPM, an eight actuated with six degrees of freedom CDRPM, which is under investigation for possible high speed and wide workspace applications in K.N. Toosi University of Technology. Finally, a combined numerical optimization algorithm is used to find the unique global optimum point. The result shows a significant enhancement in the performance characteristics of the KNTU CDRPM compared to that of the other CDRPMs. Since the proposed method is not restricted to any particular assumption on the objectives and design parameters, it can be used for optimal design of other manipulators. | 2009 | Journal | Parallel and Cable Robotics | |
| Dynamic Analysis of a MacroMicro Redundantly Actuated Parallel Manipulator Hamid D. Taghirad and Meyer A. Nahon Advanced Robotics | Abstract: In this paper the dynamic analysis of a macromicro parallel manipulator is studied in detail. The manipulator architecture is a simplified planar version adopted from the structure of the Large Adaptive Reflector (LAR), the Canadian design of next-generation giant radio telescopes. In this structure it is proposed to use two parallel redundant manipulators at the macro and micro level, both actuated by cables. In this paper, the governing dynamic equation of motion of such a structure is derived using the NewtonEuler formulation. Next, the dynamic equations of the system are used in the open-loop inverse dynamics simulations, as well as closed-loop forward dynamics simulations. In the open-loop dynamic simulations it is observed that the inertial forces of the limbs contribute only 10% of the dynamic forces required to generate a typical trajectory and, moreover, the total dynamic forces contribute only 10% of the experimentally measured disturbance forces. Furthermore, in the closed-loop simulations using decentralized PD controllers at the macro and micro levels, it is shown that the macromicro structure results in a 10 times more accurate positioning than that in the first stage of the macromicro structure. This convincing result promotes the use of the macromicro structure for LAR application. | 2008 | Journal | Parallel and Cable Robotics | |
| Kinematic Analysis of a MacroMicro Redundantly Actuated Parallel Manipulator Hamid D. Taghirad and Meyer Nahon Advanced Robotics | Abstract: In this paper the kinematic and Jacobian analysis of a macromicro parallel manipulator is studied in detail. The manipulator architecture is a simplified planar version adopted from the structure of the Large Adaptive Reflector (LAR), the Canadian design of the next generation of giant radio telescopes. This structure is composed of two parallel and redundantly actuated manipulators at the macro and micro level, which both are cable-driven. Inverse and forward kinematic analysis of this structure is presented in this paper. Furthermore, the Jacobian matrices of the manipulator at the macro and micro level are derived, and a thorough singularity and sensitivity analysis of the system is presented. The kinematic and Jacobian analysis of the macromicro structure is extremely important to optimally design the geometry and characteristics of the LAR structure. The optimal location of the base and moving platform attachment points in both macro and micro manipulators, singularity avoidance of the system in nominal and extreme maneuvers, and geometries that result in high dexterity measures in the design are among the few characteristics that can be further investigated from the results reported in this paper. Furthermore, the availability of the extra degrees of freedom in a macromicro structure can result in higher dexterity provided that this redundancy is properly utilized. In this paper, this redundancy is used to generate an optimal trajectory for the macromicro manipulator, in which the Jacobian matrices derived in this analysis are used in a quadratic programming approach to minimize performance indices like minimal micro manipulator motion or singularity avoidance criterion. | 2008 | Journal | Parallel and Cable Robotics | |
| Dynamics Analysis of A Redundant Parallel Manipulator Driven By Elastic Cables Y. Babazadeh Bedoustani, H. D. Taghirad and M. M. Aref 2008 10th International Conference on Control, Automation, Robotics and Vision | Abstract: In this paper the dynamic analysis of a cable-driven parallel manipulator is studied in detail. The manipulator architecture is a simplified planar version adopted from the structure of large adaptive reflector (LAR), the Canadian design of next generation giant radio telescopes. This structure consists of a parallel redundant manipulator actuated by long cables. The dynamic equations of this structure are nonlinear and implicit. Long cables, large amounts of impelling forces and high accelerations raise more concern about the elasticity of cables during dynamic analysis, which has been neglected in the preceding works. In this paper, the kinematic analysis of such manipulator is illustrated first. Then the nonlinear dynamic of such mechanism is derived using Newton-Euler formulation. Next a simple model for cable dynamics containing elastic and damping behavior is proposed. The proposed model neither ignores longitude elasticity properties of cable nor makes dynamic formulations heavily complicated like previous researches. Finally, manipulator dynamic with cable dynamic is derived, and the cable elasticity effects are compared in a simulation study. The results show significant role of elasticity in a cable-driven parallel manipulator such as the one used in LAR mechanism. | 2008 | Conference | Parallel and Cable Robotics | |
| Dynamic Analysis of the KNTU CDRPM: A Cable Driven Redundant Parallel Manipulator Pooneh Gholami, Mohammad M. Aref and Hamid D. Taghirad 2008 IEEE/ASME International Conference on Mechtronic and Embedded Systems and Applications | Abstract: KNTU CDRPM is a cable driven redundant parallel manipulator, which is under investigation for possible implementation of large workspace applications. This newly developed manipulators have several advantages compared to the conventional parable mechanisms. In this paper, the governing dynamic equation of motion of such structure is derived using the Newton-Euler formulation. Next, the dynamic equations of the system are used in simulations. It is shown that on the contrary to serial manipulators, dynamic equations of motion of cable-driven parallel manipulators can be only represented implicitly, and only special integration routines can be used for their simulations. In order to verify the accuracy and integrity of the derived dynamic equations, open- and closed-loop simulations for the system is performed and analyzed. Also, the effects of mechanical assembly tolerances on the closed-loop control performance of a cable driven parallel robot are studied in detail, and the sensitivity analysis of the precision in the construction and assembly of the system on the closed-loop behavior of the KNTU CDRPM is performed. | 2008 | Conference | Parallel and Cable Robotics | |
| On The Control of the KNTU CDRPM: A Cable Driven Redundant Parallel Manipulator Pooneh Gholami, Mohammad M. Aref and Hamid D. Taghirad 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems | Abstract: This paper is devoted to the control of a cable driven redundant parallel manipulator, which is a challenging problem due the optimal resolution of its inherent redundancy. Additionally to complicated forward kinematics, having a wide workspace makes it difficult to directly measure the pose of the end-effector. The goal of the controller is trajectory tracking in a large and singular free workspace, and to guarantee that the cables are always under tension. A control topology is proposed in this paper which is capable to fulfill the stringent positioning requirements for these type of manipulators. Closed-loop performance of various control topologies are compared by simulation of the closed-loop dynamics of the KNTU CDRPM, while the equations of parallel manipulator dynamics are implicit in structure and only special integration routines can be used for their integration. It is shown that the proposed joint space controller is capable to satisfy the required tracking performance, despite the inherent limitation of task space pose measurement. | 2008 | Conference | Parallel and Cable Robotics | |
| Geometrical Workspace Analysis of a Cable-Driven Redundant Parallel Manipulator: KNTU CDRPM Mohammad M. Aref and Hamid D. Taghirad 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems | Abstract: KNTU CDRPM is a cable driven redundant parallel manipulator, which is under investigation for possible high speed and large workspace applications. This newly developed mechanisms have several advantages compared to the conventional parallel mechanisms. Its rotational motion range is relatively large, its redundancy improves safety for failure in cables, and its design is suitable for long-time high acceleration motions. In this paper, collision-free workspace of the manipulator is derived by applying fast geometrical intersection detection method, which can be used for any fully parallel manipulator. Implementation of the algorithm on the Neuron design of the KNTU CDRPM leads to significant results, which introduce a new style of design of a spatial cable-driven parallel manipulators. The results are elaborated in three presentations; constant-orientation workspace, total orientation workspace and orientation workspace. | 2008 | Conference | Parallel and Cable Robotics | |
| Dynamic and Sensitivity Analysis of KNTU CDRPM: A Cable Driven Redundant Parallel Manipulator Mohammad M. Aref, Pooneh Gholami and Hamid D. Taghirad 2008 IEEE/ASME International Conference on Mechtronic and Embedded Systems and Applications | Abstract: KNTU CDRPM is a cable driven redundant parallel manipulator, which is under investigation for possible implementation of large workspace applications. This newly developed manipulators have several advantages compared to the conventional parable mechanisms. In this paper, the governing dynamic equation of motion of such structure is derived using the Newton-Euler formulation. Next, the dynamic equations of the system are used in simulations. It is shown that on the contrary to serial manipulators, dynamic equations of motion of cable-driven parallel manipulators can be only represented implicitly, and only special integration routines can be used for their simulations. In order to verify the accuracy and integrity of the derived dynamic equations, open- and closed-loop simulations for the system is performed and analyzed. Also, the effects of mechanical assembly tolerances on the closed-loop control performance of a cable driven parallel robot are studied in detail, and the sensitivity analysis of the precision in the construction and assembly of the system on the closed-loop behavior of the KNTU CDRPM is performed. | 2008 | Journal | Parallel and Cable Robotics | |
| Task Based Optimal Geometric Design and Positioning of Serial Robotic Manipulators Sasan Barissi and Hamid D. Taghirad Mechtronic and Embedded Systems and Applications | Abstract: This paper devises a multi-objective cost function which elaborates different constraints as well as an optimality criterion for design of serial robotic manipulators. In practice, inclusion of different constraints drastically limits the possible range of design parameters. The result of minimizing this multi-objective cost function is compared with another method which locates an optimal solution using a graphical representation. The effectiveness of the proposed cost function is demonstrated by a unified solution for both methods. In addition, possible tolerance of design parameters is compensated by considering a neighborhood around these parameters. Through an illustrative example, it is shown that the inclusiveness and flexibility of the proposed method makes it suitable for geometric design optimization of robotic manipulators. | 2008 | Journal | Parallel and Cable Robotics | |
| Forward Kinematics of A MacroMicro Parallel Manipulator Hamid D. Taghirad and Meyer A. Nahon Advanced intelligent mechatronics | Abstract: In this paper the kinematic analysis of a macro-micro parallel manipulator is studied in detail. The manipulator architecture is a simplified planar version adopted from the structure of large adaptive reflector (LAR), the Canadian design of next generation giant radio telescopes. This structure is composed of two parallel and redundantly actuated manipulators at macro and micro level, which both are cable-driven. Inverse and forward kinematic analysis of this structure is presented in this paper. It is shown that unique closed form solution to the inverse kinematic problem of such structure exists. However, the forward kinematic solution is derived using numerical methods, and simulation results are reported to illustrate the integrity and accuracy of the solution. | 2007 | Conference | Parallel and Cable Robotics | |
| Position Controller Synthesis for The Redundant Hydraulic Shoulder Manipulator H. Sadjadian and H. D. Taghirad ICEE15 | Abstract: In this paper,positioncontrol has been designed for a 3 DOF actuator redundant sphericnl parallel manipulator.A two norm minimization approach has been used to resolve the actuator redundancy problem. Robust stability of the closed loop system is analyzed considering uncertainties inherent in the dynamic model of the manipulator.A simulation study is also performed to showthe effectiveness of the proposed method. Thc results show the applicability of simple and conventional controllersto control redundant spherical parallel manip lators | 2007 | Conference | Parallel and Cable Robotics | |
| Dynamic Analysis of A Redundantly Actuated Parallel Manipulator:A Virtual Work Approach Hamid D. Taghirad and Meyer Nahon Advanced Robotics | Abstract: In this paper the dynamic analysis of a macromicro parallel manipulator is studied in detail. The manipulator architecture is a simplified planar version adopted from the structure of the Large Adaptive Reflector (LAR), the Canadian design of next-generation giant radio telescopes. In this structure it is proposed to use two parallel redundant manipulators at the macro and micro level, both actuated by cables. In this paper, the governing dynamic equation of motion of such a structure is derived using the NewtonEuler formulation. Next, the dynamic equations of the system are used in the open-loop inverse dynamics simulations, as well as closed-loop forward dynamics simulations. In the open-loop dynamic simulations it is observed that the inertial forces of the limbs contribute only 10% of the dynamic forces required to generate a typical trajectory and, moreover, the total dynamic forces contribute only 10% of the experimentally measured disturbance forces. Furthermore, in the closed-loop simulations using decentralized PD controllers at the macro and micro levels, it is shown that the macromicro structure results in a 10 times more accurate positioning than that in the first stage of the macromicro structure. This convincing result promotes the use of the macromicro structure for LAR application. | 2007 | Conference | Parallel and Cable Robotics | |
| Kinematic, singularity and stiffness analysis of the hydraulic shoulder: a 3-d.o.f. redundant parallel manipulator H. Sajadian and H. D. Taghirad Advanced Robotics | Abstract: In this paper, kinematic modeling and singularity and stiffness analysis of a 3-d.o.f. redundant parallel manipulator have been elaborated in detail. It is known that, contrary to series manipulators, the forward kinematic map of parallel manipulators involves highly coupled non-linear equations, whose closed-form solution derivation is a real challenge. This issue is of great importance noting that the forward kinematics solution is a key element in closed-loop position control of parallel manipulators. Using the idea of inherent kinematic chains formed in parallel manipulators, both inverse and forward kinematics of the redundant parallel manipulator are fully developed, and a closed-form solution for the forward kinematic map of the parallel manipulator is derived. The closed-form solution is also obtained in detail for the Jacobian of the mechanism and singularity analysis of the manipulator is performed based on the computed Jacobian. Finally, as the first step to develop a control topology based on the overall stiffness property of the manipulator, the stiffness mapping of the manipulator is derived and its configuration dependence is analyzed. It is observed that the actuator redundancy in the mechanism is the major element to improve the Cartesian stiffness and, hence, the dexterity of the hydraulic shoulder. Moreover, loosing one limb actuation reduces the stiffness of the manipulator significantly. | 2006 | Journal | Parallel and Cable Robotics | |
| Comparison of Different Methods for Computing the Forward Kinematics of a Redundant Parallel Manipulator H. Sajadian and H. D. Taghirad Journal of Intelligent and Robotic Systems | Abstract: In this paper, three numerical methods are presented to solve the forward kinematics of a three DOF actuator-redundant hydraulic parallel manipulator. It is known, that on the contrary to series manipulators, the forward kinematic map of parallel manipulators involves highly coupled nonlinear equations, whose closed-form solution derivation is a real challenge. This issue is of great importance noting that the forward kinematics solution is a key element in closed loop position control of parallel manipulators. The proposed methods, namely the Neural Network Estimation, the Quasi-closed Solution, and the Taylor series approximation, are using mainly numerical computations, with different ideas to solve the problem in hand. The latter two methods are proposed for the first time in literature to solve the forward kinematics of a parallel manipulator. These methods are compared in detail and the advantages or the disadvantages of each method in computing the forward kinematic map of the given mechanism is discussed. It is shown that a 4th order Taylor series approximation to the problem provides a good compromise for practical applications compared to that of other methods considered in this paper. | 2006 | Journal | Parallel and Cable Robotics | |
| Impedance Control of the Hydraulic Shoulder H. Sajadian and H. D. Taghirad International Conference on Robotics and Biomimetics | Abstract: In this paper, a model-based impedance control strategy is developed for a 3 DOF parallel manipulator to manage the interaction of the robot with the environment. Kinematic and dynamic modeling of the manipulator has been analyzed in order to be used for both simulation and control purposes. The impedance controller objective and the structure of the proposed controller are introduced and controller gain selection is discussed. A simulation study evaluates the effectiveness of the proposed impedance control structure. It is observed that although the proposed controller is designed for impedance adjustment of the robot, in case of free motion, it results into desirable position tracking. Moreover, when the robot comes into contact with the environment, the interaction dynamics can be regulated regardless of the nonlinear dynamics of the robot. | 2006 | Conference | Parallel and Cable Robotics | |
| Kinematic and Singularity Analysis of the Hydraulic Shoulder H. Sadjadian and H. D. Taghirad Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics | Abstract: In this paper, kinematic modeling and singularity analysis of a three DOF redundant parallel manipulator has been elaborated in detail. It is known, that on the contrary to series manipulators, the forward kinematic map of parallel manipulators involves highly coupled nonlinear equations, whose closed-form solution derivation is a real challenge. This issue is of great importance noting that the forward kinematics solution is a key element in closed loop position control of parallel manipulators. Using the novel idea of kinematic chains recently developed for parallel manipulators, both inverse and forward kinematics of our parallel manipulator are fully developed, and a closed-form solution for the forward kinematic map of the parallel manipulator is derived. The closed form solution is also obtained in detail for the Jacobian of the mechanism and singularity analysis of the manipulator is performed based on the computed Jacobian. | 2005 | Conference | Parallel and Cable Robotics | |
| Kinematic Analysis of the Hydraulic Shoulder: A 3-DOF Redundant Parallel Manipulator H. Sadjadian and H.D. Taghirad Mechatronics and Automation | Abstract: In this paper, kinematic modeling of a three DOF redundant parallel manipulator has been elaborated in detail. It is known, that on the contrary to series manipulators, the forward kinematic map of parallel manipulators involves highly coupled nonlinear equations, whose closed-form solution derivation is a real challenge. This issue is of great importance noting that the forward kinematics solution is a key element in closed loop position control of parallel manipulators. Using the novel idea of kinematic chains recently developed for parallel manipulators, both inverse and forward kinematics of our parallel manipulator are fully developed, and a closed-form solution for the forward kinematic map of the parallel manipulator is derived. The closed form solution is finally verified by simulated trajectories in the workspace of the manipulator. | 2005 | Conference | Parallel and Cable Robotics | |
| Neural Networks Approaches for Computing the Forward Kinematics of a Redundant Parallel Manipulator H. Sadjadian , H.D. Taghirad, A. Fatehi | Abstract: In this paper, different approaches to solve the forward kinematics of a three DOF actuator redundant hydraulic parallel manipulator are presented. On the contrary to series manipulators, the forward kinematic map of parallel manipulators involves highly coupled nonlinear equations, which are almost impossible to solve analytically. The proposed methods are using neural networks identification with different structures to solve the problem. The accuracy of the results of each method is analyzed in detail and the advantages and the disadvantages of them in computing the forward kinematic map of the given mechanism is discussed in detail. It is concluded that ANFIS presents the best performance compared to MLP, RBF and PNN networks in this particular application. | 2005 | Journal | Parallel and Cable Robotics | |
| Comparison of Different Methods for Computing the Forward Kinematics of a Redundant Parallel Manipulator H. Sajadian and H. D. Taghirad Journal of Intelligent and Robotic Systems | Abstract: In this paper, three numerical methods are presented to solve the forward kinematics of a three DOF actuator-redundant hydraulic parallel manipulator. It is known, that on the contrary to series manipulators, the forward kinematic map of parallel manipulators involves highly coupled nonlinear equations, whose closed-form solution derivation is a real challenge. This issue is of great importance noting that the forward kinematics solution is a key element in closed loop position control of parallel manipulators. The proposed methods, namely the Neural Network Estimation, the Quasi-closed Solution, and the Taylor series approximation, are using mainly numerical computations, with different ideas to solve the problem in hand. The latter two methods are proposed for the first time in literature to solve the forward kinematics of a parallel manipulator. These methods are compared in detail and the advantages or the disadvantages of each method in computing the forward kinematic map of the given mechanism is discussed. It is shown that a 4th order Taylor series approximation to the problem provides a good compromise for practical applications compared to that of other methods considered in this paper. | 2005 | Journal | Parallel and Cable Robotics | |
| A Quasi-Closed Solution Method for Computing the Forward Kinematics of a Redundant Parallel Manipulator H. Sadjadian and H.D. Taghirad 12th Iranian Conference on Electric Engineering | Abstract: In this paper, a quasi-closed solution method is presented to solve the forward kinematics of a three DOF actuator redundant hydraulic parallel manipulator. It is shown, that on the contrary to series manipulators, the forward kinematic map of the parallel manipulators involves highly coupled nonlinear equations, which are almost impossible to solve analytically. The proposed method uses a combination of analytical and numerical schemes to solve the problem. A simulation study is performed using a sample trajectory to identify the advantages and disadvantages of the proposed method in computing the forward kinematic map of the given mechanism. The results show that the proposed method provides us with a relatively fast solution and good tracking performance although being dependent on the initial conditions used in the solution process. | 2004 | Conference | Parallel and Cable Robotics | |
| A Robust Linear Controller for Flexible Joint Manipulators H.D. Taghirad and M.A. Khosravi 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) | Abstract: In this paper a new and completely linear algorithm is proposed for composite robust control of flexible joint robots. Moreover, the robust stability of the closed loop system in the presence of structured and unstructured uncertainties is analyzed. To introduce the idea, flexible joint robot with structured and unstructured uncertainties is modelled and converted into singular perturbation form. A robust linear control algorithm is proposed for the slow dynamics and its robust stability conditions are derived using Thikhonov's theorem. Then the robust stability of the total system considering the proposed composite controller is analyzed, and sufficient conditions for robust stability of system is obtained. Finally the effectiveness of the proposed controller is verified through simulations. It is shown that not only the tracking performance of the proposed controller is very suitable, but also the actuator effort is much smaller than previous result. | 2004 | Conference | Parallel and Cable Robotics | |
| Numerical Methods for Computing the Forward Kinematics of a Redundant Parallel Manipulator H. Sadjadian and H.D. Taghirad | Abstract: In this paper, three numerical methods are presented to solve the forward kinematics of a three DOF actuator-redundant hydraulic parallel manipulator. It is known, that on the contrary to series manipulators, the forward kinematic map of parallel manipulators involves highly coupled nonlinear equations, whose closed-form solution derivation is a real challenge. This issue is of great importance noting that the forward kinematics solution is a key element in closed loop position control of parallel manipulators. The proposed methods, namely the Neural Network Estimation, the Quasi-closed Solution, and the Taylor series approximation, are using mainly numerical computations, with different ideas to solve the problem in hand. The latter two methods are proposed for the first time in literature to solve the forward kinematics of a parallel manipulator. These methods are compared in detail and the advantages or the disadvantages of each method in computing the forward kinematic map of the given mechanism is discussed. It is shown that a 4th order Taylor series approximation to the problem provides a good compromise for practical applications compared to that of other methods considered in this paper. | 2004 | Conference | Parallel and Cable Robotics |

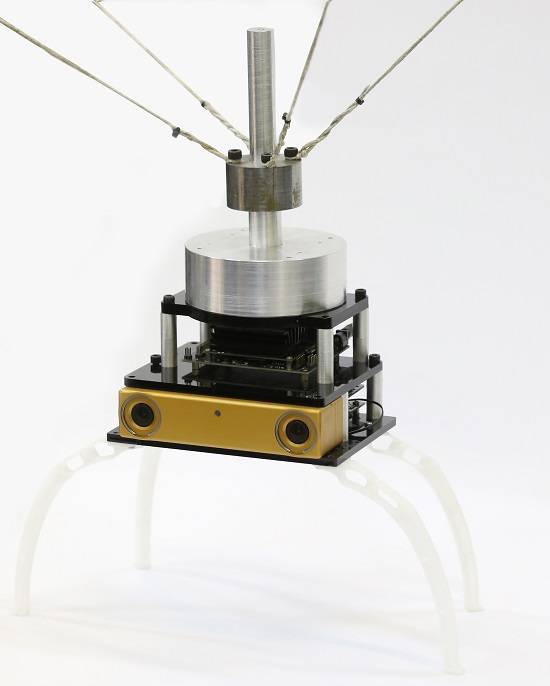{kind=link}
{kind=link}
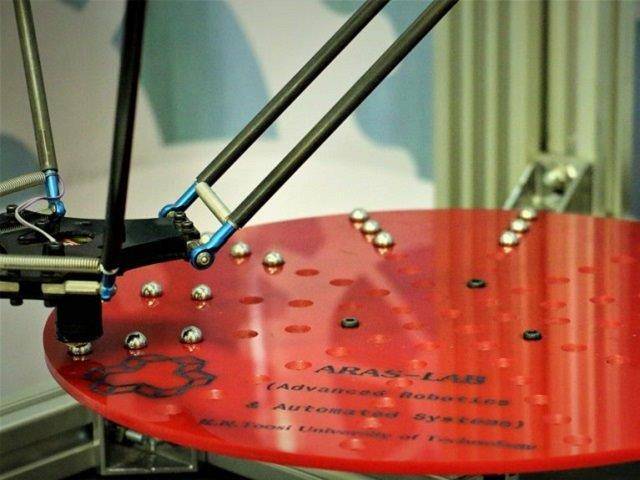{kind=link}
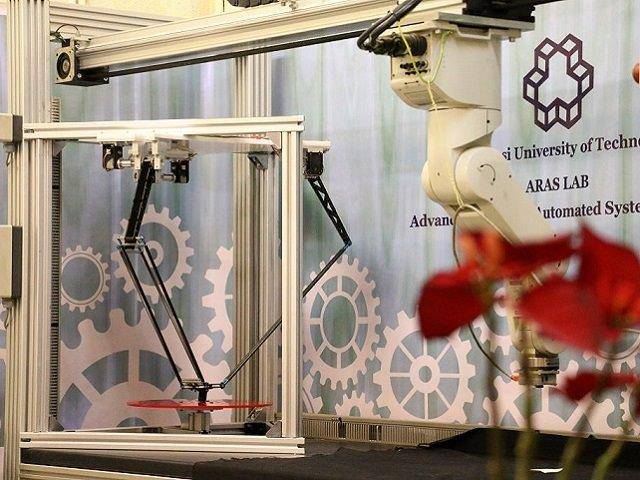{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
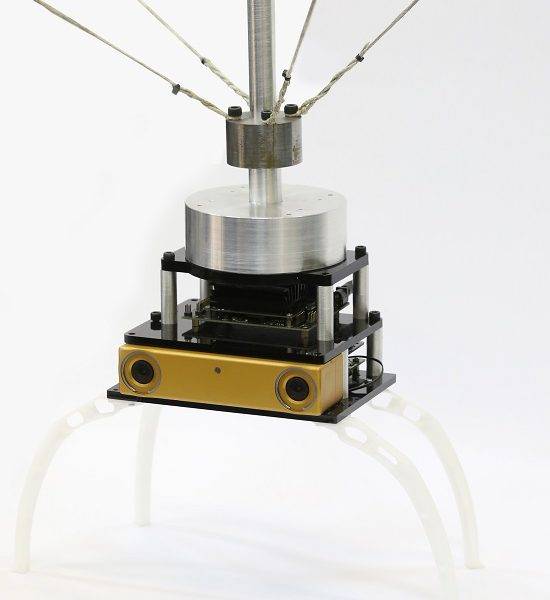{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}